Программное обеспечение AUTOSAR Blockset поддерживает моделирование программных компонентов AUTOSAR для адаптивной платформы AUTOSAR. Для разработки адаптивного программного компонента AUTOSAR в Simulink ® создайте модель Simulink, представляющую адаптивный программный компонент AUTOSAR. Инициируйте создание модели одним из следующих способов:
Импортируйте существующее описание компонента AUTOSAR XML (ARXML) в среду Simulink в качестве модели. Описание компонента импортируется с помощью средства импорта AUTOSAR ARXML.
Переработайте существующую модель Simulink в представление адаптивного программного компонента AUTOSAR.
Начиная с шаблона модели блока AUTOSAR, создайте модель Simulink.
После создания исходного проекта модели уточните алгоритмическое содержание.
В этом учебном пособии показан пример представления модели адаптивного программного компонента AUTOSAR.
Открытая модель LaneGuidance.
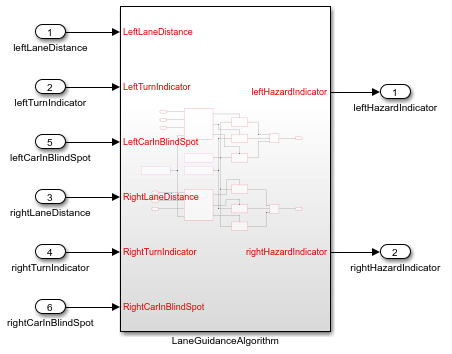
Изучите модель. Он состоит из подсистемы, LaneGuidanceAlgorithm. Подсистема имеет шесть входов, которые представляют требуемые порты адаптивного программного компонента AUTOSAR: leftLaneDistance, leftTurnIndicator, leftCarInBlindSpot, rightLaneDistance, rightTurnIndicator, и rightCarInBlindSpot. Два внешних порта представляют порты поставщика: leftHazardIndicator и rightHazardIndicator.
Задайте для параметра конфигурации модели System target file значение autosar_adaptive.tlc. Этот параметр целевого файла системы позволяет использовать программное обеспечение AUTOSAR Blockset и влияет на другие параметры конфигурации модели. Например:
Язык имеет значение C++.
Выбран только код создания.
Для цепочки инструментов установлено значение AUTOSAR Adaptive | CMake.
Для упаковки интерфейса кода установлено значение C++ class.
На верхнем уровне модели настройте связь на основе событий. Адаптивный программный компонент AUTOSAR предоставляет и потребляет услуги. Каждый компонент содержит:
Алгоритм, выполняющий задачи в ответ на принятые события
Требуемые и предоставляемые порты, каждый из которых связан с сервисным интерфейсом
Сервисные интерфейсы со связанными событиями и связанными пространствами имен
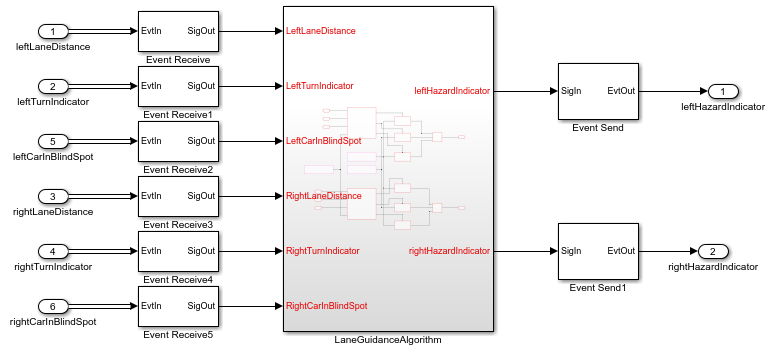
Блок AUTOSAR предоставляет блоки получения и отправки событий для создания необходимых соединений событий и сигналов.
После каждого корневого входа добавьте блок приема событий, который преобразует входное событие в сигнал с сохранением значений сигнала и типа данных.
Перед каждым корневым портом добавьте блок отправки событий, который преобразует входной сигнал в событие с сохранением значений сигнала и типа данных.
Чтобы ускорить вставку блока, можно скопировать блоки событий из завершенной версии модели примера. autosar_LaneGuidance.
Ознакомьтесь с конфигурацией модели. Параметры решателя:
Тип имеет значение Fixed-step.
Решателю присвоено значение auto (Automatic solver selection).
Фиксированный размер шага (время основной выборки) устанавливается равным 1/10.
Периодическое ограничение по времени имеет значение Unconstrained.
В редакторе Simulink можно включить цветовой код образца времени, выбрав вкладку Отладка (Debug) и выбрав Диагностика (Diagnostics) > Информационные наложения (Information Overlays) > Цвета (Colors). Условное обозначение времени выборки показывает неявную группировку скорости. Легенда для этой модели показывает, что модель использует одну скорость 0,1 секунды. Модель моделируется в однозадачном режиме.
Сохраните модель в доступной для записи папке в текущем пути поиска MATLAB ®. Назовите файлmy_autosar_LaneGuidance.slx.
Затем настройте элементы адаптивного программного компонента AUTOSAR для использования в среде моделирования Simulink.
