В Simulink ® можно гибко моделировать структуру и поведение программных компонентов адаптивной платформы AUTOSAR.
Адаптивная платформа AUTOSAR определяет сервисно-ориентированную архитектуру для автомобильных компонентов, которая должна гибко адаптироваться к внешним событиям и условиям. По сравнению с классической платформой AUTOSAR адаптивная платформа требует:
Высокопроизводительные вычисления, потенциально с несколькими ядрами и разнородными типами процессоров.
Быстрая связь, возможно, с Ethernet или сетями на чипах.
Сильное взаимодействие между компонентами на основе услуг.
Возможность адаптировать работающие автомобильные приложения к внешним событиям и источникам информации (потенциально для высокоавтоматизированного вождения), а также к внешним коммуникациям, мониторингу и обновлениям программного обеспечения в реальном времени.
Адаптивная система AUTOSAR потенциально содержит несколько взаимосвязанных адаптивных программных компонентов. Компоненты адаптивного программного обеспечения развертываются в среде выполнения, определенной Adaptive Platform, AUTOSAR Runtime for Adaptive Applications (ARA).
Адаптивный программный компонент AUTOSAR предоставляет и потребляет услуги. Архитектура адаптивных услуг является гибкой, масштабируемой и распределенной. Службы могут обнаруживаться динамически и запускаться на локальных или удаленных электронных блоках управления (ECU). Каждый программный компонент содержит:
Автомобильный алгоритм, выполняющий задачи в ответ на полученные события.
Требуемые и предоставляемые порты, каждый из которых связан с сервисным интерфейсом, через который принимаются и отправляются события.
Сервисные интерфейсы, обеспечивающие инфраструктуру для связи на основе событий, а также связанные с ними события и пространства имен.
Для моделирования адаптивного программного компонента AUTOSAR в Simulink необходимо начать с модели, содержащей автомобильный алгоритм. На основе этой модели создается словарь AUTOSAR, который определяет сервисные интерфейсы, и ракурс кода AUTOSAR, который сопоставляет элементы модели Simulink с элементами компонента AUTOSAR. При дальнейшей разработке и уточнении адаптивного компонента в Simulink можно итеративно моделировать и строить модель.
По завершении реализации компонента можно объединить адаптивную модель программного компонента с другими моделями компонентов в модели контейнера моделирования на уровне приложения. Конечной целью является развертывание компонента как части приложения в среде ARA.
Здесь представлен высокоуровневый рабочий процесс моделирования программных компонентов на основе адаптивной платформы AUTOSAR.
Откройте модель Simulink, которая пуста или содержит функциональный алгоритм.
В диалоговом окне Параметры конфигурации модели (Model Configuration Parameters) настройте модель для создания адаптивного кода AUTOSAR. Задать для целевого файла системы значение autosar_adaptive.tlc.
Разработка алгоритмического содержания модели для использования в адаптивном программном компоненте AUTOSAR. Если модель пуста, создайте или скопируйте в алгоритм. Возможные источники алгоритмов включают алгоритмические элементы в других моделях Simulink. Примеры включают подсистемы, ссылочные модели, функциональные блоки MATLAB и блоки вызывающего абонента C.
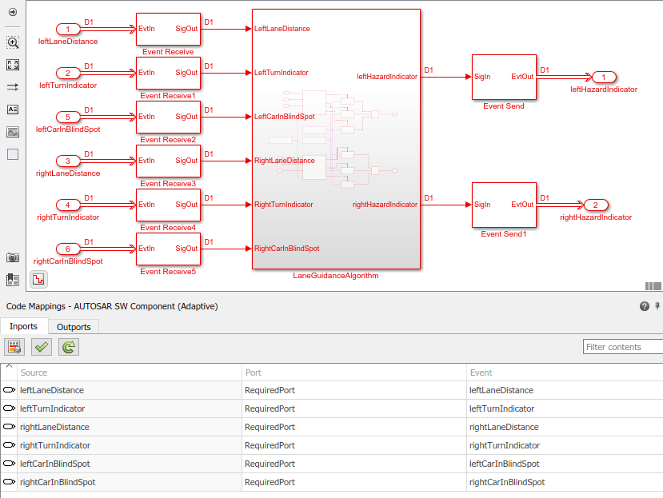
На верхнем уровне модели настройте связь на основе событий.
После каждого корневого входа добавьте блок приема событий, который преобразует входное событие в сигнал с сохранением значений сигнала и типа данных.
Перед каждым корневым портом добавьте блок отправки событий, который преобразует входной сигнал в событие с сохранением значений сигнала и типа данных.
Сопоставьте модель алгоритма с адаптивным программным компонентом AUTOSAR. Например, на вкладке Приложения щелкните Конструктор компонентов AUTOSAR. Поскольку модель не сопоставлена, открывается окно быстрого запуска компонента AUTOSAR.
Проработать процедуру быстрого запуска. Нажмите кнопку Готово (Finish), чтобы сопоставить модель. Модель открывается в ракурсе кода AUTOSAR.
Используя ракурс кода AUTOSAR и словарь AUTOSAR (или эквивалентные функции отображения и свойств AUTOSAR), уточните конфигурацию адаптивной модели AUTOSAR.
В ракурсе кода AUTOSAR проверьте соответствие входов и выходов Simulink требуемым и предоставленным портам и событиям AUTOSAR.
В словаре AUTOSAR проверьте свойства AUTOSAR для RequiredPorts, RequiredPorts и служебных интерфейсов.
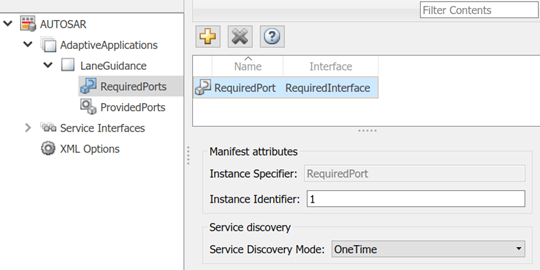
Можно развернуть узлы сервисного интерфейса для проверки связанных с ними событий AUTOSAR и определения пространств имен для кода интерфейса C++.
Создайте модель адаптивного программного компонента AUTOSAR. При построении модели генерируются:
Файлы C++, реализующие алгоритмы модели для адаптивной платформы AUTOSAR и предоставляющие общие определения типов данных.
Описания AUTOSAR XML адаптивного программного компонента AUTOSAR и информация манифеста для развертывания приложения и конфигурации службы.
Файлы C++, реализующие основной программный модуль.
Файлы заголовков среды адаптивной среды выполнения AUTOSAR (ARA).
CMakeLists.txt файл, поддерживающий создание исполняемых файлов с помощью CMake.
Дополнительные сведения см. в разделе Настройка адаптивных программных компонентов AUTOSAR.
Получение событий | Отправить событие
