При наличии доступа к программному обеспечению Simulink ® Coder™ и Embedded Coder ® можно создать модель AUTOSAR. При построении модели AUTOSAR генератор кода создает код C, соответствующий стандартным описаниям AUTOSAR и ARXML.
Если она еще не открыта, откройте настроенную версию модели. my_autosar_swc.
Инициируйте создание кода, нажав клавиши Ctrl + B. Генератор кода создает C-код и ARXML-файлы. Созданный код соответствует стандарту AUTOSAR, что позволяет запланировать код в среде выполнения AUTOSAR.
Генератор кода также создает и отображает отчет о создании кода.
В отчете по созданию кода просмотрите созданный код. В текущей папке MATLAB ® my_autosar_swc_autosar_rtw содержит основные файлы, перечисленные в этой таблице.
Созданные файлы кода
| Файлы | Описание |
|---|---|
my_autosar_swc.c | Содержит точки входа для кода, реализующего алгоритм модели. Этот файл содержит код планирования скорости. |
my_autosar_swc.h | Объявляет структуры данных модели и открытый интерфейс с точками входа модели и структурами данных. |
rtwtypes.h | Определяет типы данных, структуры и макросы, необходимые созданному коду. |
my_autosar_swc_component.arxmlmy_autosar_swc_datatype.arxmlmy_autosar_swc_implementation.arxmlmy_autosar_swc_interface.arxml | Содержит элементы и объекты, представляющие программные компоненты, порты, интерфейсы, типы данных и пакеты AUTOSAR. Файлы ARXML интегрируются в среду выполнения AUTOSAR. Файлы ARXML можно импортировать в среду Simulink с помощью средства импорта AUTOSAR ARXML. |
Откройте и просмотрите отчет по кодовому интерфейсу. Эта информация записывается в файлы ARXML. Генератор среды выполнения использует описания ARXML для сопряжения кода с средой выполнения AUTOSAR.
Функции точки входа:
Инициализация функции начальной точки - void my_autosar_swc_Init(void). При запуске вызовите эту функцию один раз.
Вывод и обновление функции начального уровня - void my_autosar_swc_Step(void). Периодически вызывайте эту функцию с самой высокой скоростью в модели. Для этой модели вызовите функцию каждую секунду. Чтобы обеспечить выполнение в реальном времени, подключите эту функцию к таймеру.
Вывод и обновление функции начального уровня - void my_autosar_swc_Step1(void). Периодически вызывайте эту функцию со второй самой быстрой скоростью в модели. Для этой модели вызовите функцию каждые 2 секунды. Чтобы обеспечить выполнение в реальном времени, подключите эту функцию к таймеру.
Функции точки входа также доступны в редакторе Сопоставления кодов на вкладке Функции. Эти созданные функции вызываются из внешнего кода или из версии созданной основной функции, которую вы изменяете. При необходимости можно изменить имя функции. Для функции шага базовой скорости модели на основе скорости и для функций шага для моделей функций экспорта можно настроить имя функции и аргументы.
Входные порты:
Блок In1_1s - Требуется порт, интерфейс: отправитель-получатель типа real-T измерения 1
Блок In2_2s - Требуется порт, интерфейс: отправитель-получатель типа real-T измерения 1
Выходные порты:
Блок Out1 - Предоставить порт, интерфейс: отправитель-получатель типа real-T измерения 1
Блок Out2 - Предоставить порт, интерфейс: отправитель-получатель типа real-T измерения 1
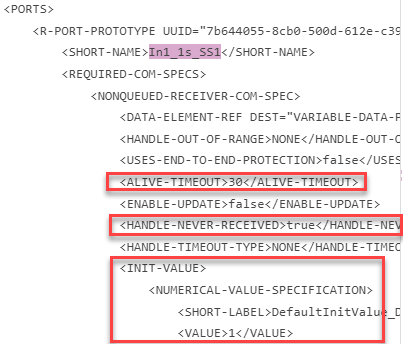
Проверьте, отображаются ли внесенные изменения конфигурации в созданном коде, с помощью панели «Код» в ракурсе «Код». Чтобы открыть панель «Код», на вкладке AUTOSAR нажмите «Просмотр кода». Панель «Код» откроется справа от модели. В поле поиска введите In1_1s_SS1, новое имя порта программного компонента AUTOSAR In1_1s. Затем нажмите кнопку со стрелкой, чтобы перейти к экземплярам имени в файле ARXML. my_autosar_swc_component.arxml. Проверьте правильность настроек атрибутов связи, измененных для порта программного компонента AUTOSAR.
Используйте панель «Код» для просмотра других аспектов созданного кода. Например, при выборе файла my_autosar_swc.c, а затем щелкните в поле поиска, появится список ссылок на элементы кода, включая функции точки входа. Используйте ссылки для быстрого перехода к ключевым областям сгенерированного кода C.
