Компенсация смещения несущей частоты
comm.CarrierSynchronizer Система object™ компенсирует частоты несущей и фазовые смещения в сигналах, использующих схемы модуляции с одной несущей. Алгоритм синхронизатора несущей совместим со схемами модуляции BPSK, QPSK, OQPSK, 8-PSK, PAM и прямоугольной QAM.
Примечание
Этот объект System не разрешает неоднозначности фаз, созданные алгоритмом синхронизации. Как показано в этой таблице, потенциальная фазовая неоднозначность, вносимая синхронизатором, зависит от типа модуляции:
| Модуляция | Неоднозначность фазы (градусы) |
|---|---|
'BPSK' или 'PAM' | 0, 180 |
'OQPSK', 'QPSK', или 'QAM' | 0, 90, 180, 270 |
'8PSK' | 0, 45, 90, 135, 180, 225, 270, 315 |
Примеры демонстрируют синхронизацию несущей и разрешение фазовой неоднозначности.
Для получения наилучших результатов примените синхронизацию несущей к незабранным сигналам, как показано в разделе «Правильное смещение фазы и частоты для 16-QAM с использованием грубой и точной синхронизации».
Для компенсации сдвигов частоты и фазы в сигналах, использующих схемы модуляции с одной несущей:
Создать comm.CarrierSynchronizer и задайте его свойства.
Вызовите объект, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
carrSynch = comm.CarrierSynchronizer
carrSynch = comm.CarrierSynchronizer(Name,Value)
Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
Корректные фазовые и частотные смещения сигнала QPSK, проходящего через канал AWGN. С помощью преамбул разрешите неоднозначность фазы.
Определите параметры моделирования.
M = 4; % Modulation order rng(1993) % For repeatable results barker = comm.BarkerCode(... 'Length',13,'SamplesPerFrame',13); % For preamble msgLen = 1e4; numFrames = 10; frameLen = msgLen/numFrames;
Добавьте преамбулы к каждому кадру, которые будут использоваться позже при выполнении разрешения фазовой неоднозначности. Формирование случайных символов данных и применение модуляции QPSK.
preamble = (1+barker())/2; % Length 13, unipolar data = zeros(msgLen,1); for idx = 1 : numFrames payload = randi([0 M-1],frameLen-barker.Length,1); data((idx-1)*frameLen + (1:frameLen)) = [preamble; payload]; end modSig = pskmod(data,4,pi/4);
Создать comm.PhaseFrequencyOffset Система object™ вводить фазовые и частотные смещения в модулированный входной сигнал. Задайте смещение фазы как 45 градусы, сдвиг частоты до 1 кГц и частота дискретизации до 10 кГц. Смещение частоты устанавливается равным 1% от частоты дискретизации.
pfo = comm.PhaseFrequencyOffset('PhaseOffset',45, ... 'FrequencyOffset',1e4,'SampleRate',1e6);
Создайте системный объект синхронизатора несущей, который будет использоваться для коррекции фазовых и частотных смещений с выборками на символ, равным 1.
carrierSync = comm.CarrierSynchronizer( ... 'SamplesPerSymbol',1,'Modulation','QPSK');
Применение фазовых и частотных смещений с помощью pfo Системный объект, а затем передать сигнал через канал AWGN для добавления белого гауссова шума.
modSigOffset = pfo(modSig); rxSig = awgn(modSigOffset,12);
Отображение графика рассеяния принятого сигнала. Данные появляются в окружности, а не группируются вокруг опорных точек совокупности из-за смещения частоты.
scatterplot(rxSig)

Используйте carrierSync Объект системы для коррекции сдвига фазы и частоты в принятом сигнале.
syncSignal = carrierSync(rxSig);
Используйте диаграмму созвездия для отображения первого и последнего 1000 символов синхронизированного сигнала. Перед сходимостью цикла синхронизатора отображаемые символы не группируются вокруг опорных точек созвездия. После сходимости отображаемые символы группируются вокруг опорных точек созвездия.
constDiag = comm.ConstellationDiagram( ... 'SymbolsToDisplaySource','Property','SymbolsToDisplay',300, ... 'ChannelNames',{'Before convergence','After convergence'},'ShowLegend',true, ... 'Position',[400 400 400 400]); constDiag([syncSignal(1:1000) syncSignal(9001:10000)]);

Демодулируйте синхронизированный сигнал. Вычислите и отобразите суммарные битовые ошибки и BER.
syncData = pskdemod(syncSignal,4,pi/4); [syncDataTtlErr,syncDataBER] = biterr(data(6000:end),syncData(6000:end))
syncDataTtlErr = 3990
syncDataBER = 0.4986
Неоднозначность фазы в принятом сигнале может вызвать битовые ошибки. С помощью преамбулы определите неоднозначность фазы. Удалите эту фазовую неоднозначность из синхронизированного сигнала, чтобы уменьшить битовые ошибки.
idx = 9000 + (1:barker.Length); phOffset = angle(modSig(idx) .* conj(syncSignal(idx))); phOffset = round((2/pi) * phOffset); % -1, 0, 1, +/-2 phOffset(phOffset==-2) = 2; % Prep for mean operation phOffset = mean((pi/2) * phOffset); % -pi/2, 0, pi/2, or pi disp(['Estimated mean phase offset = ',num2str(phOffset*180/pi),' degrees'])
Estimated mean phase offset = 180 degrees
resPhzSig = exp(1i*phOffset) * syncSignal;
Демодулируйте сигнал после разрешения фазовой неоднозначности. Повторно вычислите и отобразите обновленные суммарные битовые ошибки и BER. Удаление фазовой неоднозначности значительно снижает BER.
resPhzData = pskdemod(resPhzSig,4,pi/4); [resPhzTtlErr, resPhzBER] = biterr(data(6000:end),resPhzData(6000:end))
resPhzTtlErr = 403
resPhzBER = 0.0504
Оцените сдвиг частоты, введенный в шумный 8-PSK сигнал, используя системный object™ синхронизатора несущей.
Определите параметры моделирования.
M = 8; % Modulation order fs = 1e6; % Sample rate (Hz) foffset = 1000; % Frequency offset (Hz) phaseoffset = 15; % Phase offset (deg) snrdb = 20; % Signal-to-noise ratio (dB)
Создать comm.PhaseFrequencyOffset Объект системы для введения фазовых и частотных смещений в модулированный сигнал.
pfo = comm.PhaseFrequencyOffset('PhaseOffset',phaseoffset, ... 'FrequencyOffset',foffset,'SampleRate',fs);
Создайте системный объект синхронизатора несущих, который будет использоваться для коррекции фазового и частотного смещений. Установите Modulation свойство для 8PSK.
carrierSync = comm.CarrierSynchronizer('Modulation','8PSK');
Генерировать случайные данные и применять 8-PSK модуляцию.
data = randi([0 M-1],5000,1); modSig = pskmod(data,M,pi/M);
Примените фазовые и частотные смещения с помощью объекта pfo System и передайте сигнал через канал AWGN для добавления гауссова белого шума.
modSigOffset = pfo(modSig); rxSig = awgn(modSigOffset,snrdb);
Используйте синхронизатор несущей для оценки фазового сдвига принятого сигнала.
[~,phError] = carrierSync(rxSig);
Определите смещение частоты с помощью diff для вычисления аппроксимированной производной фазовой ошибки. Производная должна быть масштабирована на , потому что фазовая ошибка измеряется в радианах.
estFreqOffset = diff(phError)*fs/(2*pi);
Постройте график среднего значения расчетного сдвига частоты. После того как синхронизатор сходится к решению, среднее значение оценки приблизительно равно значению смещения входной частоты 1000 Гц.
rmean = cumsum(estFreqOffset)./(1:length(estFreqOffset))'; plot(rmean) xlabel('Symbols') ylabel('Estimated Frequency Offset (Hz)') grid

Компенсация значительных фазовых и частотных сдвигов для 16-QAM сигнала в канале AWGN выполняется в два этапа. Сначала корректируют грубый сдвиг частоты, используя оценку, предоставленную компенсатором грубой частоты, а затем точно настраивают коррекцию, используя синхронизацию несущей. Из-за грубой коррекции частоты синхронизатор несущей быстро сходится, даже если нормализованная полоса пропускания установлена на низкое значение. Более низкие нормализованные значения полосы пропускания позволяют лучше корректировать небольшие остаточные смещения несущих. После применения поправок на сдвиг фазы и частоты к принятому сигналу разрешите неоднозначность фазы с помощью преамбул.
Определите параметры моделирования.
fs = 10000; % Sample rate (Hz) sps = 4; % Samples per symbol M = 16; % Modulation order k = log2(M); % Bits per symbol rng(1996) % Set seed for repeatable results barker = comm.BarkerCode(... 'Length',13,'SamplesPerFrame',13); % For preamble msgLen = 1e4; numFrames = 10; frameLen = msgLen/numFrames;
Создайте полезные данные и добавьте преамбулу к каждому кадру. Преамбула позже используется для разрешения фазовой неоднозначности.
preamble = (1+barker())/2; % Length 13, unipolar data = zeros(msgLen, 1); for idx = 1 : numFrames payload = randi([0 M-1],frameLen-barker.Length,1); data((idx-1)*frameLen + (1:frameLen)) = [preamble; payload]; end
Создайте системный объект для фильтрации формы импульса передачи, фильтрации формы импульса приема, грубой компенсации частоты КАМ, синхронизации несущей и диаграммы созвездия.
txFilter = comm.RaisedCosineTransmitFilter( ... 'OutputSamplesPerSymbol',sps); rxFilter = comm.RaisedCosineReceiveFilter(... 'InputSamplesPerSymbol',sps,'DecimationFactor',sps); coarse = comm.CoarseFrequencyCompensator('SampleRate',fs, ... 'FrequencyResolution',10); fine = comm.CarrierSynchronizer( ... 'DampingFactor',0.4,'NormalizedLoopBandwidth',0.001, ... 'SamplesPerSymbol',1,'Modulation','QAM'); axislimits = [-6 6]; constDiagram = comm.ConstellationDiagram('ReferenceConstellation',qammod(0:M-1,M), ... 'ChannelNames',{'Before convergence','After convergence'}, ... 'ShowLegend',true,'XLimits',axislimits,'YLimits',axislimits);
Также создайте объект System для канала AWGN, а также сдвиг фазы и частоты, чтобы добавить к сигналу нарушения. Фазовое смещение больше 90 градусов добавляется, чтобы вызвать фазовую неоднозначность, которая приводит к сдвигу квадранта созвездия.
ebn0 = 8; freqoffset = 110; phaseoffset = 110; awgnChannel = comm.AWGNChannel('EbNo',ebn0, ... 'BitsPerSymbol',k,'SamplesPerSymbol',sps); pfo = comm.PhaseFrequencyOffset('FrequencyOffset',freqoffset, ... 'PhaseOffset',phaseoffset,'SampleRate',fs);
Генерируют случайные символы данных, применяют 16-QAM модуляцию и пропускают модулированный сигнал через фильтр формирования импульсов передачи.
txMod = qammod(data,M); txSig = txFilter(txMod);
Применение фазовых и частотных смещений с помощью pfo Системный объект, а затем передать сигнал через канал AWGN для добавления белого гауссова шума.
txSigOffset = pfo(txSig); rxSig = awgnChannel(txSigOffset);
Объект системы компенсатора грубой частоты обеспечивает грубую коррекцию для сдвига частоты. Для условий в этом примере достаточно корректировать сдвиг частоты принятого сигнала в пределах 10 Гц передаваемого сигнала.
syncCoarse = coarse(rxSig);
Пропустить сигнал через фильтр формирования приемных импульсов и применить точную коррекцию частоты.
rxFiltSig = fine(rxFilter(syncCoarse));
Отображение диаграммы созвездий первого и последнего 1000 символов в сигнале. Перед сходимостью контура синхронизации спиральный характер диаграммы указывает на то, что сдвиг частоты не корректируется. После того, как синхронизатор несущей сходится к решению, символы выравниваются по опорной совокупности.
constDiagram([rxFiltSig(1:1000) rxFiltSig(9001:end)])

Демодулируйте сигнал. Учет задержки сигнала, вызванной фильтрами передачи и приема, для выравнивания принятых данных с переданными данными. Вычислите и отобразите суммарные битовые ошибки и BER. При проверке битовых ошибок используйте более позднюю часть принятого сигнала, чтобы убедиться в сходимости контура синхронизации.
rxData = qamdemod(rxFiltSig,M);
delay = (txFilter.FilterSpanInSymbols + rxFilter.FilterSpanInSymbols) / 2;
idxSync = 2000; % Check BER for the received signal after the synchronization loop has converged
[syncDataTtlErr,syncDataBER] = biterr(data(idxSync:end-delay),rxData(idxSync+delay:end))syncDataTtlErr = 16116
syncDataBER = 0.5042
В зависимости от используемых случайных данных могут быть битовые ошибки, возникающие в результате фазовой неоднозначности в принятом сигнале после того, как контур синхронизации сходится и блокируется. В этом случае можно использовать преамбулу для определения и последующего удаления фазовой неоднозначности из синхронизированного сигнала для уменьшения битовых ошибок. Если неоднозначность фазы минимальна, число битовых ошибок может быть неизменным.
idx = 9000 + (1:barker.Length); phOffset = angle(txMod(idx) .* conj(rxFiltSig(idx+delay))); phOffsetEst = mean(phOffset); disp(['Phase offset = ',num2str(rad2deg(phOffsetEst)),' degrees'])
Phase offset = -90.1401 degrees
resPhzSig = exp(1i*phOffsetEst) * rxFiltSig;
Демодулируйте сигнал после разрешения фазовой неоднозначности. Повторно вычислите суммарные битовые ошибки и BER.
resPhzData = qamdemod(resPhzSig,M); [resPhzTtlErr,resPhzBER] = biterr(data(idxSync:end-delay),resPhzData(idxSync+delay:end))
resPhzTtlErr = 5
resPhzBER = 1.5643e-04
Ухудшение канала модели, такое как сдвиг фазы синхронизации, сдвиг частоты несущей и сдвиг фазы несущей для сигнала минимальной манипуляции сдвигом (MSK). Использовать comm.MSKTimingSynchronizer и comm.CarrierSynchronizer Система стремится синхронизировать такие сигналы в приемнике. Синхронизатор синхронизации MSK восстанавливает смещение синхронизации, в то время как синхронизатор несущей восстанавливает частоту несущей и фазовые смещения.
Инициализация системных переменных с помощью сценария MATLAB configureMSKSignalRecoveryEx. Определение логической переменной управления recoverTimingPhase для обеспечения возможности восстановления фазы синхронизации, и recoverCarrier обеспечение возможности восстановления несущей частоты и фазы.
configureMSKSignalRecoveryEx; recoverTimingPhase = true; recoverCarrier = true;
Моделирование обесценения каналов
Укажите задержку выборки, timingOffset, что применяется модель канала. Создание объекта переменной дробной задержки для введения временной задержки в передаваемый сигнал.
timingOffset = 0.2; varDelay = dsp.VariableFractionalDelay;
Создать comm.PhaseFrequencyOffset Задачей системы является введение фазовых и частотных сдвигов несущей в модулированный сигнал. Поскольку модулятор MSK увеличивает выборку передаваемых символов, установите SampleRate свойство к отношению samplesPerSymbol и время выборки, Ts.
freqOffset = 50; phaseOffset = 30; pfo = comm.PhaseFrequencyOffset(... 'FrequencyOffset',freqOffset, ... 'PhaseOffset',phaseOffset, ... 'SampleRate',samplesPerSymbol/Ts);
Создать comm.AWGNChannel Системный объект для добавления белого гауссова шума к модулированному сигналу. Мощность шума определяется EbNo свойство, то есть отношение энергии битов к спектральной плотности мощности шума. Поскольку модулятор MSK генерирует символы с мощностью 1 Вт, установите свойство мощности сигнала объекта системы AWGN канала на 1.
EbNo = 20 + 10*log10(samplesPerSymbol); chAWGN = comm.AWGNChannel(... 'NoiseMethod','Signal to noise ratio (Eb/No)', ... 'EbNo',EbNo,... 'SignalPower',1, ... 'SamplesPerSymbol',samplesPerSymbol);
Фаза синхронизации, частота несущей и синхронизация фазы несущей
Создайте синхронизатор синхронизации MSK для восстановления фазы синхронизации символов с использованием метода нелинейности четвертого порядка.
timeSync = comm.MSKTimingSynchronizer(... 'SamplesPerSymbol',samplesPerSymbol, ... 'ErrorUpdateGain',0.02);
Создайте синхронизатор несущей для восстановления как несущей частоты, так и фазы. Поскольку совокупность MSK представляет собой QPSK со смещением фазы 0 градусов, установите значение comm.CarrierSynchronizer соответственно.
phaseSync = comm.CarrierSynchronizer(... 'Modulation','QPSK', ... 'ModulationPhaseOffset','Custom', ... 'CustomPhaseOffset',0, ... 'SamplesPerSymbol',1);
Цикл обработки потока
Моделирование модулирует данные с использованием модуляции MSK. Модулированные символы проходят через модель канала, которая применяет временную задержку, несущую частоту и фазовый сдвиг и аддитивный белый гауссов шум. Приемник выполняет синхронизацию фазы и несущей частоты и восстановление фазы. Наконец, символы сигнала демодулируются и вычисляется частота битовых ошибок. plotResultsMSKSignalRecoveryEx сценарий генерирует диаграммы рассеяния в этом порядке, чтобы показать следующие эффекты:
Ухудшение канала
Синхронизация по времени
Синхронизация несущих
В конце моделирования в примере в качестве функции времени моделирования отображаются оценки фазы, частоты и фазы синхронизации.
for p = 1:numFrames %------------------------------------------------------------------------ % Generate and modulate data %------------------------------------------------------------------------ txBits = randi([0 1],samplesPerFrame,1); txSym = modem(txBits); %------------------------------------------------------------------------ % Transmit through channel %------------------------------------------------------------------------ % % Add timing offset rxSigTimingOff = varDelay(txSym,timingOffset*samplesPerSymbol); % % Add carrier frequency and phase offset rxSigCFO = pfo(rxSigTimingOff); % % Pass the signal through an AWGN channel rxSig = chAWGN(rxSigCFO); % % Save the transmitted signal for plotting plot_rx = rxSig; % %------------------------------------------------------------------------ % Timing recovery %------------------------------------------------------------------------ if recoverTimingPhase % Recover symbol timing phase using fourth-order nonlinearity % method [rxSym,timEst] = timeSync(rxSig); % Calculate the timing delay estimate for each sample timEst = timEst(1)/samplesPerSymbol; else % Do not apply timing recovery and simply downsample the received % signal rxSym = downsample(rxSig,samplesPerSymbol); timEst = 0; end % Save the timing synchronized received signal for plotting plot_rxTimeSync = rxSym; %------------------------------------------------------------------------ % Carrier frequency and phase recovery %------------------------------------------------------------------------ if recoverCarrier % The following script applies carrier frequency and phase recovery % using a second order phase-locked loop (PLL), and removes phase ambiguity [rxSym,phEst] = phaseSync(rxSym); removePhaseAmbiguityMSKSignalRecoveryEx; freqShiftEst = mean(diff(phEst)/(Ts*2*pi)); phEst = mod(mean(phEst),360); % in degrees else freqShiftEst = 0; phEst = 0; end % Save the phase synchronized received signal for plotting plot_rxPhSync = rxSym; %------------------------------------------------------------------------ % Demodulate the received symbols %------------------------------------------------------------------------ rxBits = demod(rxSym); %------------------------------------------------------------------------ % Calculate the bit error rate %------------------------------------------------------------------------ errorStats = BERCalc(txBits,rxBits); %------------------------------------------------------------------------ % Plot results %------------------------------------------------------------------------ plotResultsMSKSignalRecoveryEx; end



Отображение частоты битовых ошибок и общего количества символов, обработанных калькулятором частоты ошибок.
BitErrorRate = errorStats(1) TotalNumberOfSymbols = errorStats(3)
BitErrorRate =
4.0001e-06
TotalNumberOfSymbols =
499982
Заключение и дальнейшие эксперименты
Алгоритмы восстановления демонстрируются с использованием графиков созвездий, взятых после синхронизации по времени, несущей частоте и фазе несущей.
Откройте сценарий, чтобы создать доступную для записи копию этого примера и его вспомогательных файлов. Затем, чтобы показать эффекты алгоритмов восстановления, можно включить и отключить логические управляющие переменные recoverTimingPhase и recoverCarrier и повторно запустите моделирование.
Приложение
В этом примере используются следующие сценарии:
configureMSKSignalRecoveryEx
plotResultsMSKSignalRecoveryEx
removePhaseAmbiguityMSKSignalRecoveryEx
comm.CarrierSynchronizer Системный объект представляет собой компенсатор с замкнутым контуром, использующий алгоритм на основе PLL, описанный в [1]. Выход синхронизатора yn представляет собой сдвинутую по частоте версию комплексного входного сигнала xn для n-ой выборки. Выходной сигнал синхронизатора:
,
где λ n - выход прямого цифрового синтезатора (DDS). DDS является дискретно-временной версией генератора, управляемого напряжением, и является центральным компонентом дискретно-временных фазоблокированных контуров. В контексте этого объекта System DDS работает как интеграционный фильтр.
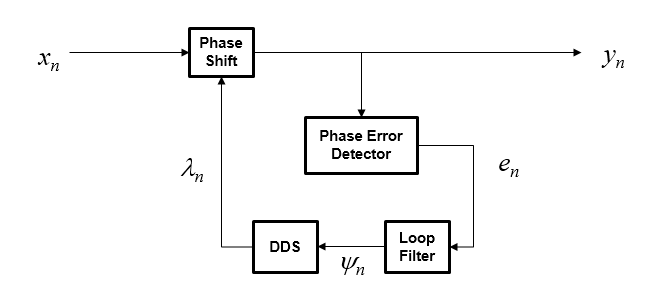
Чтобы исправить сдвиг частоты, сначала алгоритм определяет фазовую ошибку, en. Значение фазовой ошибки зависит от схемы модуляции.
| Модуляция | Фазовая ошибка |
|---|---|
| QAM или QPSK | xn}) × Re {xn} Подробное описание этого уравнения см. в [1]. |
| BPSK или PAM | Im {xn} Подробное описание этого уравнения см. в [1]. |
| 8-PSK | × Re {xn}, для | Re Подробное описание этого уравнения см. в [2]. |
| OQPSK | xn}) × Re {xn} |
Для обеспечения стабильности системы фазовая ошибка проходит через фильтр биквадратического контура, управляемый
− 1,
где λ n - выходной сигнал фильтра контура при выборке n, а gI - коэффициент усиления интегратора. Коэффициент усиления интегратора определяется из уравнения
KpK0,
где start, d, K0 и Kp определяются из свойств объекта System. В частности,
,
где Bn - нормализованная ширина полосы пропускания контура, а start- коэффициент демпфирования. Коэффициент усиления восстановления фазы, K0, равен количеству выборок на символ. Тип модуляции определяет коэффициент усиления детектора фазовой ошибки Kp.
| Модуляция | Kp |
|---|---|
| BPSK, PAM, QAM, QPSK или OQPSK | 2 |
| 8-PSK | 1 |
Выходной сигнал фильтра контура затем передается в DDS. DDS - это еще один фильтр биквадратического цикла, выражение которого основано на правиле интеграции Euler
,
где gP - пропорциональный коэффициент усиления, который выражается как
.
info объектная функция этого объекта System возвращает оценки нормализованного диапазона втягивания, максимальной задержки синхронизации частоты и максимальной задержки фазовой синхронизации. Нормированный диапазон втягивания (Δf) втягивания выражается в радианах и оценивается как
).
Выражение для (Δf) втягивания становится менее точным, поскольку приближается к 1.
Максимальная задержка синхронизации частоты, TFL и задержка синхронизации фазы, TPL, выражаются в выборках и оцениваются как
.
[1] Райс, М. Цифровые коммуникации: дискретный временной подход. Река Верхнее Седло, Нью-Джерси: Прентис Холл, 2009, стр. 359-393.
[2] Чжицзе, Х., Я. Чжицян, З. Мин и У. Куан. «8PSK демодуляция для нового поколения DVB-S2». Международная конференция 2004 года по вопросам коммуникаций, схем и систем. Т. 2, 2004, с. 1447-1450.
