Правильный сдвиг синхросигналов символов
comm.SymbolSynchronizer Система object™ корректирует сдвиг синхронизации символов между передатчиком с одной несущей и приемником для схем модуляции PAM, PSK, QAM и OQPSK. Дополнительные сведения см. в разделе Обзор синхронизации символов.
Примечание
Входной сигнал работает на основе частоты дискретизации, а выходной сигнал работает на основе частоты символов.
Для коррекции перекоса синхросигналов символов:
Создать comm.SymbolSynchronizer и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
symbolSync = comm.SymbolSynchronizer
symbolSync = comm.SymbolSynchronizer(Name,Value)comm.SymbolSynchronizer('Modulation','OQPSK') конфигурирует системный объект синхронизатора символов для OQPSK-модулированного входного сигнала. Заключите каждое имя свойства в кавычки.
Настраиваемый DampingFactor, NormalizedLoopBandwidth, и DetectorGain свойства позволяют оптимизировать производительность синхронизатора в цикле моделирования без освобождения объекта.
Для более ранних версий, чем R2016b, используйте step для запуска алгоритма объекта System. Аргументы для step - созданный объект, за которым следуют аргументы, показанные в этом разделе.
Например, y = step(obj,x) и y = obj(x) выполнять эквивалентные операции.
symbols = symbolSync(samples)
Вход работает на основе частоты дискретизации, а выходной сигнал работает на основе частоты символов.
Вы можете настроить DampingFactor, NormalizedLoopBandwidth, и DetectorGain для повышения производительности синхронизатора.
Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
Исправьте фиксированную ошибку синхронизации символа в шумном QPSK-модулированном сигнале. Проверьте частоту битовых ошибок (BER) синхронизированного принятого сигнала.
Инициализация параметров моделирования.
M = 4; % Modulation order for QPSK nSym = 5000; % Number of symbols in a packet sps = 4; % Samples per symbol timingErr = 2; % Samples of timing error snr = 15; % Signal-to-noise ratio (dB)
Создание корня raised cosine (RRC) передачи и приема фильтра системных объектов.
txfilter = comm.RaisedCosineTransmitFilter( ... 'OutputSamplesPerSymbol',sps); rxfilter = comm.RaisedCosineReceiveFilter( ... 'InputSamplesPerSymbol',sps,'DecimationFactor',2);
Создайте системный объект синхронизатора символов для исправления ошибки синхронизации.
symbolSync = comm.SymbolSynchronizer;
Генерируют случайные M-ary символы и применяют модуляцию QPSK.
data = randi([0 M-1],nSym,1); modSig = pskmod(data,M,pi/4);
Создайте объект задержки, чтобы ввести фиксированную ошибку синхронизации из 2 выборок. Поскольку фильтр RRC передачи выводит 4 выборки на символ, 1 выборка эквивалентна символу 1/4 через фиксированную задержку и канал.
fixedDelay = dsp.Delay(timingErr);
fixedDelaySym = ceil(fixedDelay.Length/sps); % Round fixed delay to nearest integer in symbolsФильтрация модулированного сигнала через фильтр RRC передачи с помощью txfilter объект. Примените ошибку синхронизации сигнала с помощью fixedDelay объект.
txSig = txfilter(modSig); delaySig = fixedDelay(txSig);
Пропускают задержанный сигнал через канал AWGN с отношением сигнал/шум 15 дБ.
rxSig = awgn(delaySig,snr,'measured');Фильтрация модулированного сигнала через фильтр RRC приема с помощью rxfilter объект. Отображение графика разброса. Из-за ошибки синхронизации принятый сигнал не выравнивается с ожидаемой опорной комбинацией QPSK.
rxSample = rxfilter(rxSig); scatterplot(rxSample(1001:end),2)

Исправьте ошибку синхронизации символа с помощью symbolSync объект. Отображение графика разброса. Синхронизированный сигнал теперь выравнивается с ожидаемой комбинацией QPSK.
rxSync = symbolSync(rxSample); scatterplot(rxSync(1001:end),2)

Демодулируйте сигнал QPSK.
recData = pskdemod(rxSync,M,pi/4);
Вычисляют, в символах, общую системную задержку из-за фиксированной задержки и фильтры RRC передачи и приема.
sysDelay = dsp.Delay(fixedDelaySym + txfilter.FilterSpanInSymbols/2 + ...
rxfilter.FilterSpanInSymbols/2);Вычислите BER с учетом системной задержки.
[numErr,ber] = biterr(sysDelay(data),recData)
numErr = 12
ber = 0.0012
Исправьте фиксированную ошибку синхронизации символа в шумном сигнале передачи BPSK. Проверьте частоту битовых ошибок (BER) синхронизированного принятого сигнала.
Инициализация параметров моделирования.
M = 2; % Modulation order for BPSK nSym = 20000; % Number of symbols in a packet sps = 4; % Samples per symbol timingErr = 2; % Samples of timing error snr = 15; % Signal-to-noise ratio (dB)
Создание корня raised cosine (RRC) передачи и приема фильтра системных объектов.
txfilter = comm.RaisedCosineTransmitFilter(... 'OutputSamplesPerSymbol',sps); rxfilter = comm.RaisedCosineReceiveFilter(... 'InputSamplesPerSymbol',sps,'DecimationFactor',1);
Создайте системный object™ синхронизатора символов для исправления ошибки синхронизации.
symbolSync = comm.SymbolSynchronizer(... 'SamplesPerSymbol',sps, ... 'NormalizedLoopBandwidth',0.01, ... 'DampingFactor',1.0, ... 'TimingErrorDetector','Early-Late (non-data-aided)');
Генерировать случайные символы данных и применять модуляцию BPSK.
data = randi([0 M-1],nSym,1); modSig = pskmod(data,M);
Создайте объект задержки, чтобы ввести фиксированную ошибку синхронизации из 2 выборок. Поскольку фильтр RRC передачи выводит 4 выборки на символ, 1 выборка эквивалентна символу 1/4 через фиксированную задержку и канал.
fixedDelay = dsp.Delay(timingErr);
fixedDelaySym = ceil(fixedDelay.Length/sps); % Round fixed delay to nearest integer in symbolsФильтрация модулированного сигнала через фильтр RRC передачи с помощью txfilter объект. Примените ошибку синхронизации сигнала с помощью fixedDelay объект.
txSig = txfilter(modSig); delayedSig = fixedDelay(txSig);
Передача задержанного сигнала через канал AWGN.
rxSig = awgn(delayedSig,snr,'measured');Фильтрация модулированного сигнала через фильтр RRC приема с помощью rxfilter объект. Отображение графика разброса. Из-за ошибки синхронизации принятый сигнал не выравнивается с ожидаемой опорной совокупностью BPSK.
rxSample = rxfilter(rxSig); scatterplot(rxSample(10000:end),2)

Исправьте ошибку синхронизации символа с помощью symbolSync объект. Отображение графика разброса. Синхронизированный сигнал теперь выравнивается с ожидаемой совокупностью BPSK.
rxSync = symbolSync(rxSample); scatterplot(rxSync(10000:end),2)

Демодулируйте сигнал BPSK.
recData = pskdemod(rxSync,M);
Вычисляют, в символах, общую системную задержку из-за фиксированной задержки и фильтры RRC передачи и приема.
sysDelay = dsp.Delay(fixedDelaySym + txfilter.FilterSpanInSymbols/2 + ...
rxfilter.FilterSpanInSymbols/2);Вычислите BER с учетом системной задержки.
[numErr1,ber1] = biterr(sysDelay(data),recData)
numErr1 = 8
ber1 = 4.0000e-04
Исправьте ошибки синхронизации символов и смещения частоты с помощью comm.SymbolSynchronizer и comm.CarrierSynchronizer Системные объекты.
Конфигурация
Инициализация параметров моделирования.
M = 16; % Modulation order nSym = 2000; % Number of symbols in a packet sps = 2; % Samples per symbol spsFilt = 8; % Samples per symbol for filters and channel spsSync = 2; % Samples per symbol for synchronizers lenFilt = 10; % RRC filter length
Создайте согласованную пару корневых объектов фильтра RRC для передатчика и приемника.
txfilter = comm.RaisedCosineTransmitFilter('FilterSpanInSymbols',lenFilt, ... 'OutputSamplesPerSymbol',spsFilt,'Gain',sqrt(spsFilt)); rxfilter = comm.RaisedCosineReceiveFilter('FilterSpanInSymbols',lenFilt, ... 'InputSamplesPerSymbol',spsFilt,'DecimationFactor',spsFilt/2,'Gain',sqrt(1/spsFilt));
Создайте объект системы фазового сдвига для введения доплеровского сдвига 100 Гц.
doppler = comm.PhaseFrequencyOffset('FrequencyOffset',100, ... 'PhaseOffset',45,'SampleRate',1e6);
Создайте объект системы с переменной задержкой, чтобы ввести смещения синхронизации.
varDelay = dsp.VariableFractionalDelay;
Создание объектов системы синхронизации несущих и символов для коррекции доплеровского сдвига и смещения синхронизации соответственно.
carrierSync = comm.CarrierSynchronizer('SamplesPerSymbol',spsSync); symbolSync = comm.SymbolSynchronizer( ... 'TimingErrorDetector','Early-Late (non-data-aided)', ... 'SamplesPerSymbol',spsSync);
Создание диаграммы созвездий Системные объекты для просмотра результатов.
refConst = qammod(0:M-1,M,'UnitAveragePower',true); cdReceive = comm.ConstellationDiagram('ReferenceConstellation',refConst, ... 'SamplesPerSymbol',spsFilt,'Title','Received Signal'); cdDoppler = comm.ConstellationDiagram('ReferenceConstellation',refConst, ... 'SamplesPerSymbol',spsSync,'Title','Frequency Corrected Signal'); cdTiming = comm.ConstellationDiagram('ReferenceConstellation',refConst, ... 'SamplesPerSymbol',spsSync,'Title','Frequency and Timing Synchronized Signal');
Основной цикл обработки
Основной цикл обработки:
Генерирует случайные символы и применяет модуляцию КАМ.
Фильтрация модулированного сигнала.
Применяет частотные и временные смещения.
Пропускает передаваемый сигнал через канал AWGN.
Фильтрация принятого сигнала.
Коррекция доплеровского сдвига.
Коррекция смещения синхронизации.
for k = 1:15 data = randi([0 M-1],nSym,1); modSig = qammod(data,M,'UnitAveragePower',true); txSig = txfilter(modSig); txDoppler = doppler(txSig); txDelay = varDelay(txDoppler,k/15); rxSig = awgn(txDelay,25); rxFiltSig = rxfilter(rxSig); rxCorr = carrierSync(rxFiltSig); rxData = symbolSync(rxCorr); end
Визуализация
Постройте график созвездий принятого сигнала, скорректированного по частоте сигнала и синхронизированного по частоте и времени сигнала. Конкретные точки созвездия не могут быть идентифицированы в принятом сигнале и могут быть идентифицированы только частично в сигнале с поправкой на частоту. Однако синхронизированный по времени и частоте сигнал выравнивается с ожидаемыми точками совокупности КАМ.
cdReceive(rxSig)

cdDoppler(rxCorr)

cdTiming(rxData)

Исправьте монотонно увеличивающуюся ошибку синхронизации символа в шумном 8-PSK сигнале. Отображение нормализованной ошибки синхронизации.
Инициализация параметров моделирования.
M = 8; % Modulation order nSym = 5000; % Number of symbol in a packet sps = 2; % Samples per symbol nSamp = sps*nSym; % Number of samples in a packet
Создание корня raised cosine (RRC) передачи и приема фильтра системных объектов.
txfilter = comm.RaisedCosineTransmitFilter( ... 'OutputSamplesPerSymbol',sps); rxfilter = comm.RaisedCosineReceiveFilter( ... 'InputSamplesPerSymbol',sps, ... 'DecimationFactor',1);
Создайте переменную дробную задержку System object™, чтобы ввести монотонно увеличивающуюся ошибку синхронизации.
varDelay = dsp.VariableFractionalDelay;
Создайте системный объект синхронизатора символов для исправления ошибки синхронизации.
symbolSync = comm.SymbolSynchronizer(... 'TimingErrorDetector','Mueller-Muller (decision-directed)', ... 'SamplesPerSymbol',sps);
Генерировать случайные 8-арные символы и применять 8-PSK модуляцию.
data = randi([0 M-1],nSym,1); modSig = pskmod(data,M,pi/8);
Фильтрация модулированного сигнала через фильтр передачи с увеличенным косинусом и применение монотонно увеличивающейся временной задержки.
vdelay = (0:1/nSamp:1-1/nSamp)'; txSig = txfilter(modSig); delaySig = varDelay(txSig,vdelay);
Пропускают задержанный сигнал через канал AWGN с отношением сигнал/шум 15 дБ.
rxSig = awgn(delaySig,15,'measured');Фильтрация модулированного сигнала через фильтр RRC приема. Отображение графика разброса. Из-за ошибки синхронизации принятый сигнал не выравнивается с ожидаемой 8-PSK опорной совокупностью.
rxSample = rxfilter(rxSig); scatterplot(rxSample,sps)

Исправьте ошибку синхронизации символа с помощью symbolSync объект. Отображение графика разброса. Синхронизированный сигнал теперь выравнивается с ожидаемой совокупностью 8-PSK.
[rxSym,tError] = symbolSync(rxSample); scatterplot(rxSym(1001:end))

Постройте график оценки ошибки синхронизации. Со временем нормированная ошибка синхронизации увеличивается до 1 выборки.
figure plot(vdelay,tError) xlabel('Time (s)') ylabel('Timing Error (samples)')

Алгоритм синхронизатора синхронизации символов основан на алгоритме ФАПЧ, который состоит из четырех компонентов:
Детектор ошибок синхронизации (TED)
Делающий интерполяции
Контроллер интерполяции
Фильтр контура
Для модуляции OQPSK синфазная и квадратурная составляющие сигнала сначала выравниваются (как в модуляции QPSK) с использованием буфера состояния для кэширования последней половины символа предыдущего входа. После начального выравнивания оставшийся процесс синхронизации будет таким же, как для модуляции QPSK.
На этой блок-схеме показан пример синхронизатора синхронизации. На чертеже синхронизация символа PLL действует на x (t), принятый сигнал выборки после согласованной фильтрации. Синхронизирующий сигнал символа ФАПЧ выдает сигнал символа
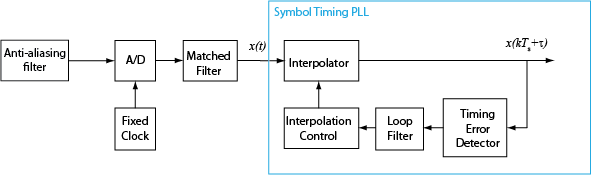
Временная задержка оценивается по выборкам с фиксированной скоростью согласованного фильтра, которые асинхронны со скоростью передачи символов. Поскольку результирующие выборки не выровнены с границами символов, для «перемещения» выборок используется интерполятор. Поскольку временная задержка неизвестна, интерполятор должен быть адаптивным. Кроме того, поскольку интерполятор представляет собой линейную комбинацию имеющихся выборок, его можно рассматривать как выходной сигнал фильтра.
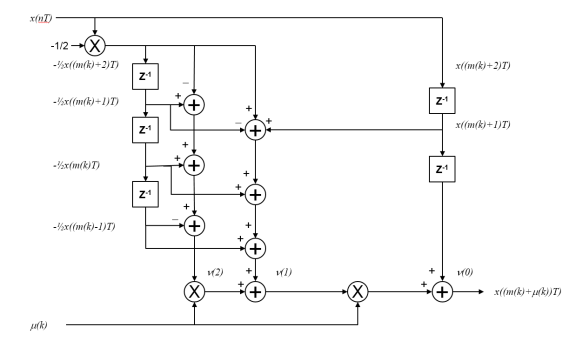
Интерполятор использует кусочно-параболический интерполятор со структурой Фэрроу и коэффициентом α, установленным в 1/2 (см. Rice, Michael, Digital Communications: A Discrete-Time Approach).
Управление интерполяцией обеспечивает интерполятор индексом базовой точки и дробным интервалом. Индекс базовой точки - это индекс выборки, ближайший к интерполятору. Дробный интервал - это отношение времени между интерполятором и индексом его базовой точки и интервалом интерполяции.
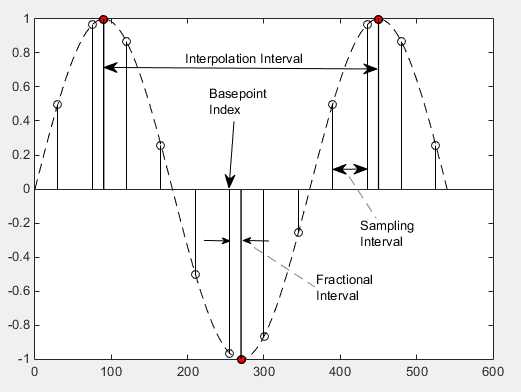
Интерполяция выполняется для каждого образца, и стробирующий сигнал используется для определения того, выведен ли интерполятор. Синхронизатор использует управление интерполяцией счетчика по модулю 1 для обеспечения строба и дробного интервала для использования с интерполятором.
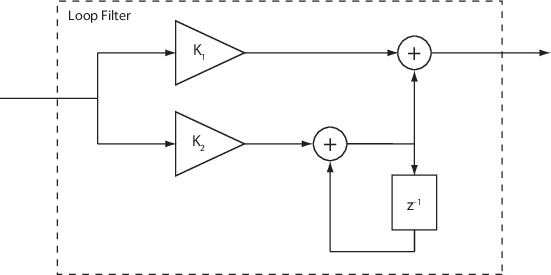
Синхронизатор использует фильтр контура интегратора пропорционального плюс (PI). Пропорциональный коэффициент усиления, K1 и коэффициент усиления интегратора, K2, вычисляются с помощью
и
Kp.
Промежуточное условие,
14,
где:
N - количество выборок на символ.
start- коэффициент демпфирования.
BnTS - нормализованная полоса пропускания шлейфа.
Kp - коэффициент усиления детектора.
[1] Райс, Майкл. Цифровая связь: дискретно-временной подход. Река Верхнее Седло, Нью-Джерси: Прентис Холл, 2008.
[2] Менгали, Умберто и Альдо Н. Д'Андреа. Методы синхронизации для цифровых приемников. Нью-Йорк: Пленум Пресс, 1997.
