PID Tuner предоставляет два типа структур модели для представления динамики завода: модели процессов и модели состояния-пространства.
Используйте свои знания системных характеристик и уровень точности, необходимый приложению для выбора структуры модели. При отсутствии какой-либо предшествующей информации можно получить некоторое представление о порядке динамики и задержек, проанализировав экспериментально полученную ступенчатую характеристику и частотную характеристику системы. Дополнительные сведения см. в документации по Toolbox™ идентификации системы:
Модели корреляции (панель инструментов идентификации системы)
Модели частотного отклика (панель инструментов идентификации системы)
Каждая выбранная структура модели имеет связанные динамические элементы или параметры модели. Значения этих параметров настраиваются вручную или автоматически для поиска идентифицированной модели, которая обеспечивает удовлетворительное соответствие измеренным или смоделированным данным отклика. Во многих случаях, когда вы не уверены в лучшей структуре для использования, это помогает начать с простейшей структуры модели, передать функцию с одним полюсом. Можно постепенно пытаться идентифицировать структуры более высокого порядка до тех пор, пока не будет достигнуто удовлетворительное соответствие между откликом завода и измеренным выходом. Структура модели «состояние-пространство» позволяет осуществлять автоматический поиск оптимального порядка модели на основе анализа данных «вход-выход».
При запуске задачи идентификации завода по умолчанию выбирается структура модели передаточной функции с одним реальным полюсом. Эта настройка по умолчанию не чувствительна к характеру данных и может не подходить для вашего приложения. Поэтому перед выполнением идентификации параметров рекомендуется выбрать подходящую структуру модели.
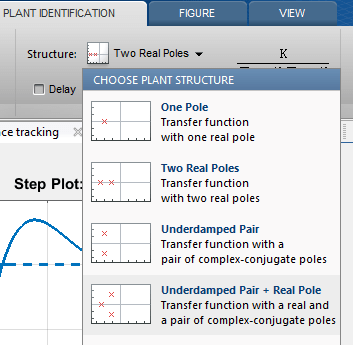
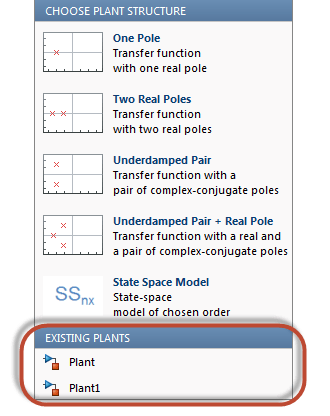
Модели процессов представляют собой передаточные функции с 3 или менее полюсами и могут быть дополнены добавлением элементов нуля, задержки и интегратора. Модели процессов параметризуются параметрами модели, представляющими постоянные времени, коэффициент усиления и временную задержку. В PID Tuner выберите модель процесса на вкладке Plant Identification с помощью меню Structure.
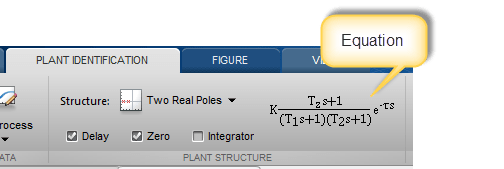
Для любой выбранной структуры можно добавить задержку, ноль и/или элемент интегратора, используя соответствующие флажки. Функция переноса модели, сконфигурированная этими вариантами, отображается рядом с меню Структура (Structure).
Простейшая доступная модель процесса - передаточная функция с одним реальным полюсом и без нулевых элементов или элементов задержки:
+ 1.
Эта модель определяется параметрами K, коэффициентом усиления и T1, первой постоянной времени. Наиболее сложная структура модели процесса имеет три полюса, дополнительный интегратор, ноль и временную задержку, такую как следующая модель, которая имеет один вещественный полюс и одну комплексную сопряженную пару полюсов:
2ζTωs + 1) e −
В этой модели конфигурируемые параметры включают временные константы, связанные с полюсами, и нулевые, T1, T, и Tz. Другие параметры - это коэффициент затухания, коэффициент усиления K и временная задержка
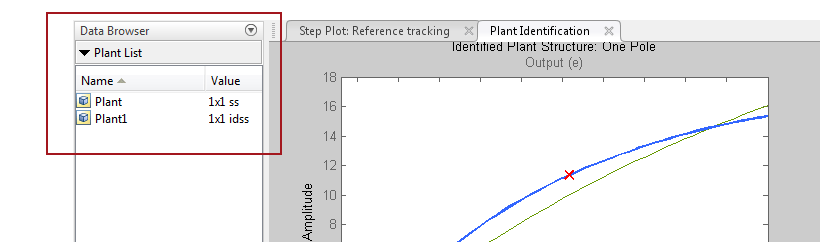
При выборе типа модели процесса PID-тюнер автоматически вычисляет начальные значения параметров установки и отображает график, показывающий как расчетный отклик модели, так и измеренные или смоделированные данные. Значения параметров можно редактировать графически с помощью индикаторов на графике или численно с помощью редактора параметров завода. Пример, иллюстрирующий этот процесс, см. в разделе Интерактивная оценка параметров завода из данных ответа.
В следующей таблице представлены различные параметры, определяющие доступные типы моделей процессов.
| Параметр | Используется | Описание |
|---|---|---|
| K - коэффициент усиления | Все функции переноса | Может принимать любую реальную стоимость. На графике перетащите кривую реакции растения (синяя) вверх или вниз, чтобы скорректировать K. |
| T1 - Первая постоянная времени | Передаточная функция с одним или несколькими реальными полюсами | Может принимать любое значение от 0 до T, временной интервал измеренных или смоделированных данных. На графике перетащите красный x влево (к нулю) или вправо (к T), чтобы настроить T1. |
| T2 - Вторая постоянная времени | Передаточная функция с двумя реальными полюсами | Может принимать любое значение от 0 до T, временной интервал измеренных или смоделированных данных. На графике перетащите пурпурный x влево (к нулю) или вправо (к T), чтобы настроить T2. |
| Тс - постоянная времени, связанная с собственной частотой, где Тс = 1/λ n | Передаточная функция с неполной парой полюсов (комплексной сопряженной парой) | Может принимать любое значение от 0 до T, временной интервал измеренных или смоделированных данных. На графике перетащите одну из оранжевых кривых огибающей отклика влево (по направлению к нулю) или вправо (по направлению к T), чтобы отрегулировать Tλ. |
| start- Коэффициент демпфирования | Передаточная функция с неполной парой полюсов (комплексной сопряженной парой) | Может принимать любое значение от 0 до 1. На графике перетащите одну из оранжевых кривых огибающей отклика влево (по направлению к нулю) или вправо (по направлению к T), чтобы настроить |
| start- Задержка транспортировки | Любая передаточная функция | Может принимать любое значение от 0 до T, временной интервал измеренных или смоделированных данных. На графике перетащите оранжевую вертикальную планку влево (в сторону нуля) или вправо (в сторону Т), чтобы отрегулировать |
| Tz - Нулевое значение модели | Любая передаточная функция | Может принимать любое значение между -T и T, временной интервал измеренных или смоделированных данных. На графике перетащите красный круг влево (в сторону -T) или вправо (в сторону T), чтобы отрегулировать Tz. |
| Интегратор | Любая передаточная функция | Добавляет коэффициент 1/с к передаточной функции. Нет связанного параметра для настройки. |
Структура модели «состояние-пространство» для идентификации в первую очередь определяется выбором количества состояний, порядка модели. Используйте структуру модели «состояние-пространство», когда модели более высокого порядка, чем модели, поддерживаемые структурами модели процесса, необходимы для достижения удовлетворительного соответствия измеренным или смоделированным данным ввода-вывода. В структуре модели «состояние-пространство» динамика системы представлена уравнениями состояния и вывода:
x - вектор переменных состояния, автоматически выбираемый программным обеспечением на основе выбранного порядка модели. u представляет входной сигнал, а y представляет выходные сигналы.
Для использования структуры модели «состояние-пространство» на вкладке «Идентификация завода» в меню «Структура» выберите State-Space Model. Затем щелкните Настроить структуру (Configure Structure), чтобы открыть диалоговое окно Структура модели пространства состояния (State-Space Model Structure).
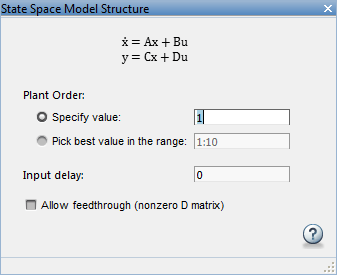
Используйте диалоговое окно, чтобы указать порядок модели, задержку и характеристики прохождения. Если вы не уверены в заказе, выберите Выбрать наилучшее значение в диапазоне и введите диапазон заказов. В этом случае при нажатии кнопки Estimate (Оценка) на вкладке Plant Estimation (Оценка завода) программа отображает гистограмму с сингулярными значениями Hankel. Выберите порядок модели, равный количеству сингулярных значений Ханкеля, которые вносят значительный вклад в динамику системы.
При выборе структуры модели «состояние-пространство» на графике идентификации отображается кривая реакции на растение (синяя), только если существует допустимая расчетная модель. Например, при изменении структуры после оценки модели процесса отображается эквивалент состояния и пространства расчетной модели. При изменении порядка модели кривая реакции завода исчезает до тех пор, пока не будет выполнена новая оценка.
При использовании структуры модели «состояние-пространство» непосредственное взаимодействие с параметрами модели невозможно. Таким образом, идентифицированная модель должна считаться неструктурированной без физического значения, привязанного к переменным состояния модели.
Однако можно графически скорректировать задержку ввода и общий коэффициент усиления модели. При выборе модели состояния-пространства с временной задержкой задержка отображается на графике вертикальной оранжевой полосой. Перетащите эту полосу по горизонтали, чтобы изменить значение задержки. Перетащите кривую реакции установки (синяя) вверх и вниз, чтобы скорректировать коэффициент усиления модели.
Все ранее импортированные или идентифицированные модели растений перечислены в разделе Список заводов (Plant List) браузера данных.
Можно определить структуру модели и инициализировать значения параметров модели с помощью одного из этих заводов. Для этого на закладке Идентификация завода в меню Структура выберите линейную модель завода, которую требуется использовать для инициализации структуры.
Если выбранная установка является моделью процесса (idproc (System Identification Toolbox)), PID-тюнер использует свою структуру. Если установка относится к какому-либо другому типу модели, PID-тюнер использует структуру модели state-space.
При переходе от одной структуры модели к другой программа максимально сохраняет характеристики модели (положение полюса/нуля, усиление, задержка). Например, при переключении с однополюсной модели на двухполюсную сохраняются существующие значения T1, Tz, startи K, T2 инициализируется значением по умолчанию (или ранее назначенным, если есть).
После выбора структуры модели имеется несколько опций для ручной или автоматической корректировки значений параметров для достижения хорошего соответствия между расчетным откликом модели и измеренными или смоделированными входными/выходными данными. Пример, иллюстрирующий все эти опции, см. в разделе:
Интерактивная оценка параметров установки на основе ответных данных (Toolbox™ системы управления)
Интерактивная оценка установки на основе измеренных или смоделированных данных ответа (Simulink Control Design) Simulink ® Control Design™)
Тюнер PID не выполняет интеллектуальную инициализацию параметров модели при выборе структуры модели. Вместо этого исходные значения параметров модели, отраженные на графике, являются произвольно выбранной серединой значений диапазона. Если перед ручной корректировкой значений параметров требуется хорошая начальная точка, используйте опцию Инициализировать и оценить на закладке Идентификация завода.
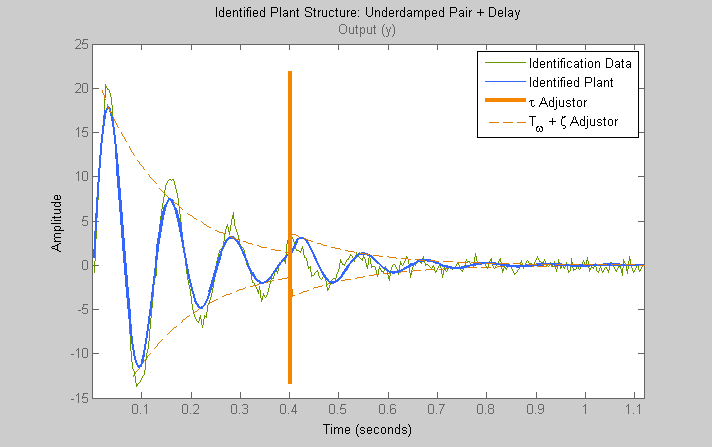
В некоторых случаях реакция системы сильно зависит от начальных условий. Таким образом, описание отношения ввода/вывода в виде передаточной функции является недостаточным для соответствия наблюдаемым данным. Особенно это касается систем, содержащих слабо затухающие режимы. PID Tuner позволяет оценить начальные условия в дополнение к параметрам модели так, чтобы сумма ответа начального условия и входного ответа хорошо соответствовала наблюдаемому выходному сигналу. Диалоговое окно Опции оценки (Estimation Options) используется для указания способа обработки начальных условий во время автоматической оценки. По умолчанию обработка начального условия (фиксация нулевых значений или оценка) выполняется алгоритмом оценки автоматически. Однако можно применить определенный выбор с помощью меню Начальные условия (Initial Conditions).
Первоначальные условия могут быть оценены только с автоматической оценкой. В отличие от параметров модели, они не могут быть изменены вручную. Однако после оценки они остаются фиксированными к своим оценочным значениям, если структура модели не изменяется или не импортируются новые идентификационные данные.
Если изменить параметры модели после выполнения автоматической оценки, отклик модели покажет фиксированный вклад (т.е. не зависящий от параметров модели) от начальных условий. На следующем графике было установлено, что воздействие исходных условий является особенно значительным. Когда задержка после этого корректируется, часть ответа слева от входного маркера задержки (δAdjustor) происходит исключительно из начальных условий. Часть, расположенная справа от регулятора, содержит эффекты как входного сигнала, так и начальных условий.