В этом примере показано, как использовать PID-тюнер для соответствия линейной модели измеренным данным отклика SISO.
При наличии программного обеспечения System Identification Toolbox™ можно использовать PID Tuner для оценки параметров линейной модели установки на основе данных отклика во временной области, измеренных в системе. Затем PID-тюнер настраивает PID-контроллер для результирующей оценочной модели. PID-тюнер предоставляет несколько методов для графической, ручной или автоматической корректировки расчетной модели в соответствии с данными ответа. Этот пример иллюстрирует некоторые из этих методов.
В этом примере данные измеренных ответов загружаются из файла данных в рабочее пространство MATLAB ®, представляющее завод как модель LTI. Сведения о создании смоделированных данных из модели Simulink ® см. в разделе Интерактивная оценка завода на основе измеренных или смоделированных данных отклика (Simulink Control Design).
Откройте PID-тюнер и загрузите данные измеренного отклика в рабочее пространство MATLAB.
pidTuner(tf(1),'PI') load PIDPlantMeasuredIOData
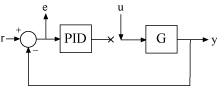
При импорте данных ответа PID-тюнер предполагает, что измеренные данные представляют установку, подключенную к PID-контроллеру в цикле отрицательной обратной связи. Другими словами, PID-тюнер предполагает следующую структуру системы. PID Tuner предполагает, что вы ввели сигнал шага на входе установки u и измерил отклик системы на y, как показано.
Образец файла данных для этого примера содержит три переменные, каждая из которых является массивом 501 на 1. inputu - функция единичного шага, введенная в u для получения данных ответа. outputy - измеренный отклик системы при y. Вектор времени t, длится от 0 до 50 с с временем выборки 0,1 с. Сравнение inputu кому t показывает, что шаг происходит в t = 5 с.
Совет
Можно импортировать данные ответа, хранящиеся в виде числового массива (как в этом примере), timeseries объект или iddata(Панель инструментов идентификации системы).
В PID Tuner в меню Plant выберите Identify New Plant.
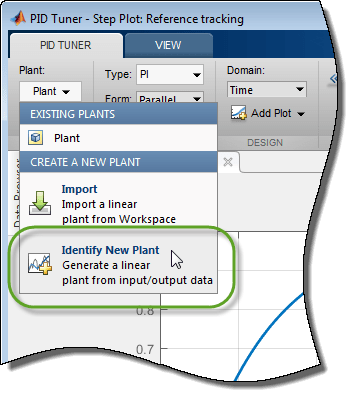
На закладке Plant Identification щелкните![]() Get I/O data и выберите Step Response. Это действие открывает диалоговое окно Импорт ответа на шаг (Import Step Response).
Get I/O data и выберите Step Response. Это действие открывает диалоговое окно Импорт ответа на шаг (Import Step Response).
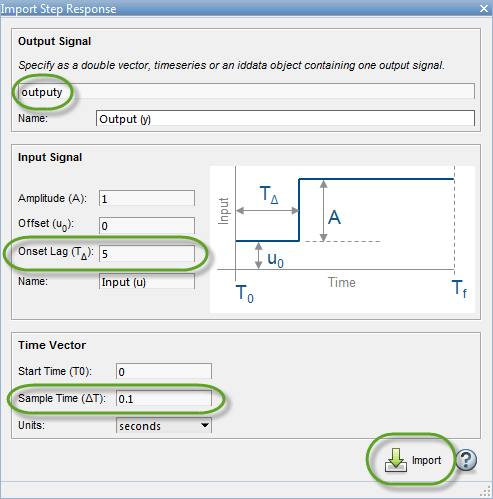
Введите информацию о данных ответа. Выходной сигнал - измеренный отклик системы, outputy. Входной сигнал шага параметризуется, как показано на диаграмме в диалоговом окне. Здесь введите 5 для начинающегося запаздывания, и 0.1 для параметра «Время выборки». Затем нажмите кнопку![]() Импорт.
Импорт.
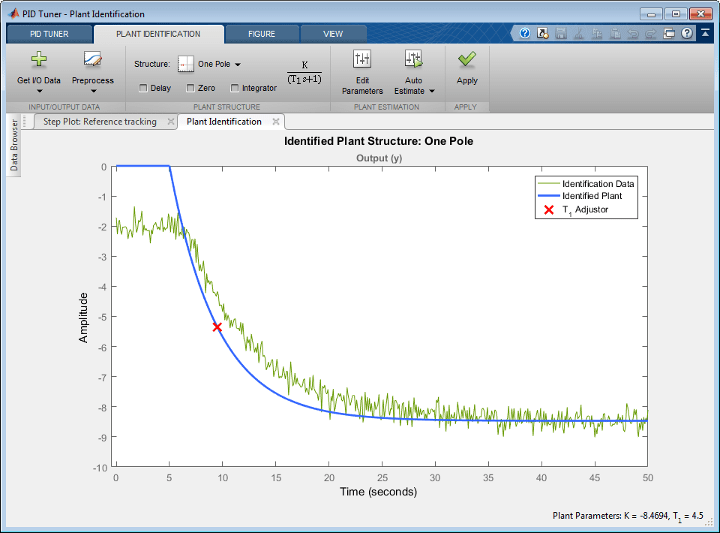
На графике «Идентификация завода» отображаются данные ответа и ответ первоначальной оценочной установки.
В зависимости от качества и особенностей данных ответа может потребоваться выполнить предварительную обработку данных для улучшения расчетных результатов завода. PID-тюнер предоставляет несколько опций для предварительной обработки данных ответа, таких как удаление смещений, фильтрация или извлечение подмножества данных. В этом примере данные ответа имеют смещение. Для получения хороших результатов идентификации важно удалить смещения данных. Для этого используйте меню Препроцесса. (Сведения о других параметрах предварительной обработки данных см. в разделе Данные предварительной обработки.)
На вкладке Идентификация завода щелкните![]() Предварительная обработка и выберите
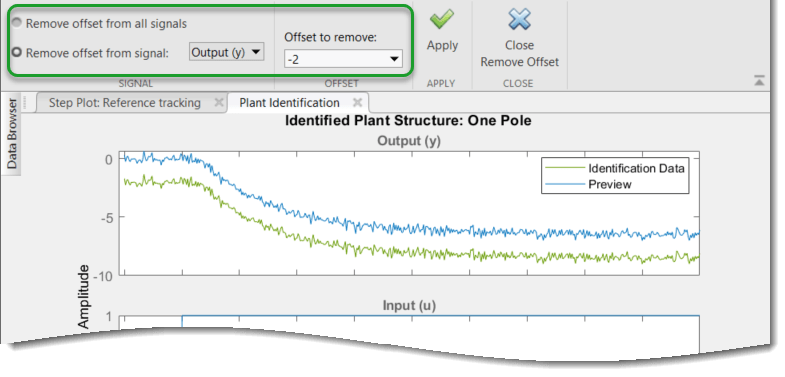
Предварительная обработка и выберите Remove Offset. Откроется вкладка Удалить смещение (Remove Offset), на которой отображаются графики времени данных ответа и соответствующего входного сигнала.
Выберите Удалить смещение от сигнала и выберите ответ, Output (y). В текстовом поле «Смещение для удаления» укажите значение –2. Можно также выбрать начальное значение сигнала или среднее значение сигнала или ввести числовое значение. График обновляется с помощью дополнительной трассировки, показывающей сигнал с примененным смещением.
Нажмите Apply![]() для сохранения изменений в сигнале. Щелкните Закрыть (Close) Удалить смещение (Remove
для сохранения изменений в сигнале. Щелкните Закрыть (Close) Удалить смещение (Remove![]() Offset),
чтобы вернуться на вкладку Идентификация завода (Plant Identif
Offset),
чтобы вернуться на вкладку Идентификация завода (Plant Identif
PID Tuner автоматически корректирует параметры установки для создания нового начального предположения для установки на основе предварительно обработанного ответного сигнала.
PID-тюнер позволяет задать структуру установки, например «Один полюс» (One Pole), «Неполная пара» (Unddamped Pair) или «State-Space» (State-Space Model). В меню Структура выберите структуру завода, которая лучше всего соответствует ответу. Можно также добавить задержку переноса, ноль или интегратор на завод. Для этого примера однополюсная структура дает качественно правильный отклик. Можно внести дополнительные корректировки в структуру завода и значения параметров для лучшего соответствия расчетной реакции системы измеренным данным реакции.
PID Tuner предоставляет несколько способов настройки параметров установки:
Графически скорректировать отклик расчетной системы путем перетаскивания регулировщиков на график. В этом примере перетащите красный цвет x для корректировки расчетной постоянной времени установки. Тюнер PID пересчитывает системные параметры. По мере изменения реакции оцененной системы становится очевидным, что между применением ввода шага в t = 5 с и отклик системы на этот шаг ввода.
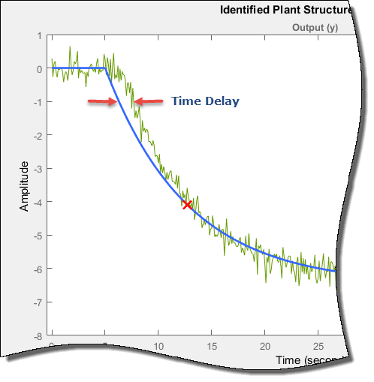
Чтобы добавить задержку переноса к расчетной модели завода, в разделе Структура завода установите флажок Задержка. На графике появляется вертикальная линия, указывающая текущее значение задержки. Перетащите линию влево или вправо, чтобы изменить задержку, и внесите дополнительные изменения в ответ системы, перетащив красный цвет. x.
Настройте числовые значения системных параметров, таких как коэффициенты усиления, постоянные времени и временные задержки. Чтобы численно скорректировать значения системных параметров, щелкните![]() Править параметры (Edit Parameters).
Править параметры (Edit Parameters).
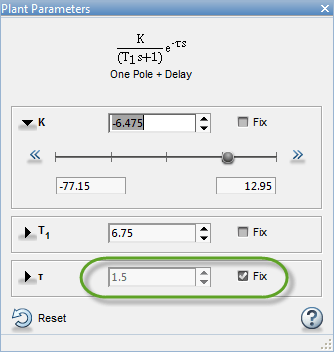
Предположим, что из независимого измерения известно, что задержка переноса в системе составляет 1,5 секунды. В диалоговом окне "Параметры завода" введите значение 1,5 для " Установите флажок «Исправить», чтобы исправить значение параметра. При выборе параметра Исправить (Fix) ни графические, ни автоматические корректировки расчетной модели завода не влияют на это значение параметра.
Автоматическая оптимизация параметров системы для соответствия измеренным данным отклика. Щелкните![]() Автоматическая оценка (Auto Estimate), чтобы обновить расчетные параметры системы, используя текущие значения в качестве начального предположения.
Автоматическая оценка (Auto Estimate), чтобы обновить расчетные параметры системы, используя текущие значения в качестве начального предположения.
Можно продолжить итерацию с помощью любого из этих методов для корректировки структуры завода и значений параметров до тех пор, пока отклик оцененной системы не будет адекватно соответствовать измеренному отклику.
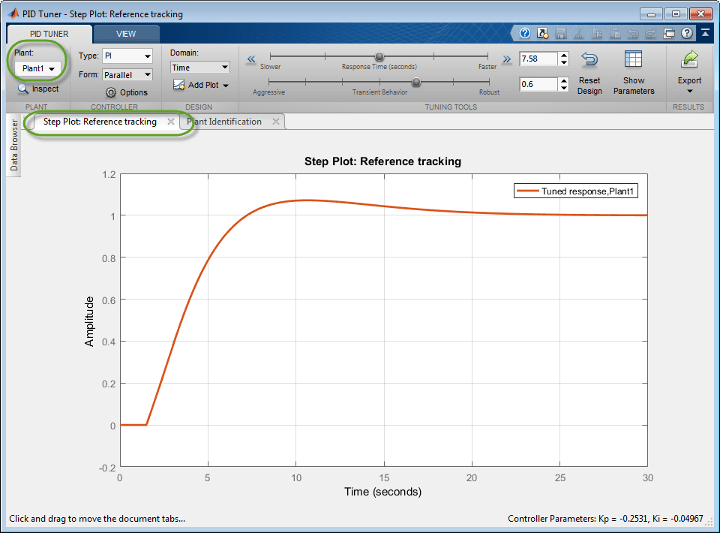
Если посадка удовлетворительна, нажмите кнопку Применить![]() (Apply). Это позволяет сохранить расчетный завод,
(Apply). Это позволяет сохранить расчетный завод, Plant1, в рабочее пространство тюнера PID. PID-тюнер автоматически проектирует PI-контроллер для Plant1 и на графике Step Plot: Reference Tracking отображается новый отклик с замкнутым контуром. Меню Plant отражает, что Plant1 выбирается для текущей конструкции контроллера.
Совет
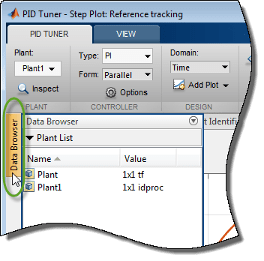
Для проверки переменных, хранящихся в рабочем пространстве PID Tuner, откройте браузер данных.
Теперь можно использовать инструменты PID Tuner для уточнения конструкции контроллера для расчетной установки и проверки настроенных системных ответов.
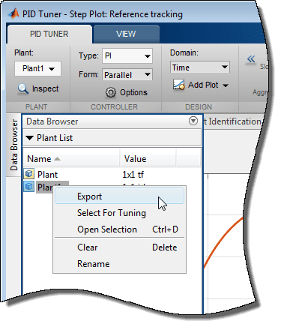
Можно также экспортировать идентифицированную установку из рабочей области PID Tuner в рабочую область MATLAB для дальнейшего анализа. На вкладке «PID-тюнер» нажмите кнопку «Экспорт![]() ». Проверьте модель завода, которую требуется экспортировать в рабочее пространство MATLAB. В этом примере экспорт
». Проверьте модель завода, которую требуется экспортировать в рабочее пространство MATLAB. В этом примере экспорт Plant1, растение, которое вы определили из данных ответа. Можно также экспортировать настроенный контроллер PID. Нажмите![]() кнопку ОК. Выбранные модели сохраняются в рабочей области MATLAB.
кнопку ОК. Выбранные модели сохраняются в рабочей области MATLAB.
Идентифицированные модели растений сохраняются как идентифицированные модели LTI, такие как idproc(Панель инструментов идентификации системы) или idss(Панель инструментов идентификации системы).
Совет
Либо щелкните правой кнопкой мыши завод в браузере данных, чтобы выбрать его для настройки или экспортировать в рабочее пространство MATLAB.