Ограничение динамики указанного настраиваемого блока в настроенной системе управления при использовании тюнера системы управления.
Controller Poles Goal ограничивает динамику настраиваемого блока в модели системы управления. Цель «Полюса контроллера» может наложить ограничение стабильности на указанный блок. Можно также задать конечную минимальную скорость затухания, минимальную скорость затухания или максимальную собственную частоту для полюсов блока. Эти ограничения позволяют исключить быструю динамику и управлять звонком в ответе настраиваемого блока.
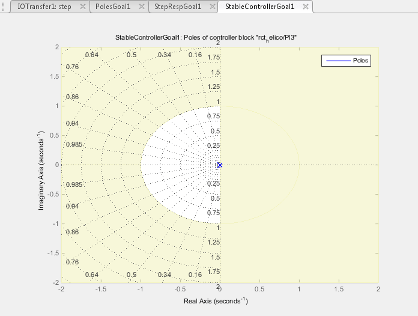
В настройщике системы управления затененная область на графике представляет область в частотной области, где ограничения местоположения полюсов не выполняются. Ограничение применяется ко всем полюсам в блоке, за исключением фиксированных интеграторов, таких как член I контроллера PID.
Чтобы ограничить динамику или обеспечить стабильность всей системы управления или контура обратной связи в системе управления, используйте Poles Goal.
На вкладке Настройка тюнера системы управления выберите Новая цель > Ограничение динамики контроллера, чтобы создать цель полюсов контроллера.
При настройке систем управления в командной строке используйте TuningGoal.ControllerPoles для указания цели полюсов контроллера.
В раскрывающемся меню выберите настроенный блок в системе управления, к которому следует применить цель «Полюса контроллера».
Если блок, который требуется ограничить, отсутствует в списке, добавьте его в список «Настроенные блоки». В окне «Настройка системы управления» на вкладке «Настройка» нажмите кнопку «Выбрать ![]() блоки». Дополнительные сведения о добавлении настроенных блоков см. в разделе Указание блоков для настройки в настройщике системы управления.
блоки». Дополнительные сведения о добавлении настроенных блоков см. в разделе Указание блоков для настройки в настройщике системы управления.
Этот раздел диалогового окна используется для задания пределов расположения полюсов.
Минимальная скорость распада
Введите требуемую минимальную скорость затухания для полюсов настраиваемого блока. Полюса блока ограничены для удовлетворения Re(s) < -MinDecay для непрерывных временных блоков или log(|z|) < -MinDecay*Ts для дискретно-временных блоков с временем выборки Ts.
Укажите неотрицательное значение для обеспечения стабильности блока. Если задано отрицательное значение, настроенный блок может содержать неустойчивые полюса.
Минимальное демпфирование
Введите требуемый минимальный коэффициент демпфирования полюсов настраиваемого блока в диапазоне от 0 до 1. Полюса блока, зависящие от настраиваемых параметров, ограничены для удовлетворения Re(s) < -MinDamping*|s|. За дискретное время коэффициент демпфирования вычисляется с использованием s=log(z)/Ts.
Максимальная собственная частота
Введите целевую максимальную собственную частоту полюсов настраиваемого блока в единицах настраиваемой модели системы управления. Полюса блока ограничены для удовлетворения |s| < MaxFrequency для непрерывных временных блоков или |log(z)| < MaxFrequency*Ts для дискретно-временных блоков с временем выборки Ts. Это ограничение предотвращает быструю динамику в настраиваемом блоке.
При настройке системы управления программа преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x - вектор свободных (настраиваемых) параметров в системе управления. Затем программа корректирует значения параметров для минимизации f (x) или для приведения f (x) ниже 1, если цель настройки является жестким ограничением.
Для цели контроллера полюсов f (x) отражает относительное удовлетворение или нарушение цели. Например, если Ваша Цель поляков Диспетчера ограничивает полюс настроенного блока к минимальному демпфированию ζ = 0.5, то:
f (x) = 1 означает, что демпфирование полюса в точности = 0,5.
f (x) = 1.1 означает, что демпфирование составляет, приблизительно, на 10% меньше целевого значения.
f (x) = 0,9 означает, что демпфирование представляет собой, приблизительно, на 10% лучше, чем целевое значение.
