Интерполяция цифрового сигнала и его преобразование из полосы частот модулирующих сигналов в полосу IF
dsp.DigitalUpConverter Система object™ интерполирует цифровой сигнал и преобразует его из полосы модулирующих частот в полосу промежуточной частоты (ПЧ).
Для цифрового преобразования входного сигнала:
Создать dsp.DigitalUpConverter и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
upConv = dsp.DigitalUpConverterupConv.
upConv = dsp.DigitalUpConverter(Name,Value)Name задать указанное значение Value. Можно указать один или несколько аргументов пары имя-значение в любом порядке как (Name1,Value1,...,NameN,ValueN). Заключите каждое имя свойства в отдельные кавычки. Например, создайте объект, который увеличивает выборку входного сигнала в 20 раз, используя фильтр с заданными качествами.
upConv = dsp.DigitalUpConverter('InterpolationFactor',20,... 'SampleRate',Fs,... 'Bandwidth',2e3,... 'StopbandAttenuation',55,... 'PassbandRipple',0.2,... 'CenterFrequency',50e3);
Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
Создайте Систему DUC object™, который сверхдискретизировал синусоидальный сигнал на 1 кГц фактором 20 и upconverts она к 50 кГц.
Примечание.Этот пример выполняется только в R2016b или более поздних версиях. При использовании более ранней версии замените каждый вызов функции эквивалентным step синтаксис. Например, myObject(x) становится step(myObject,x).
Создайте генератор волны синуса, чтобы получить синусоидальный сигнал на 1 кГц с частотой дискретизации 6 кГц.
Fs = 6e3; % Sample rate sine = dsp.SineWave('Frequency',1000,'SampleRate',Fs,'SamplesPerFrame',1024); x = sine(); % generate signal
Создайте объект DUC System. Используйте конструкции фильтров минимального порядка и установите пульсацию полосы пропускания 0,2 дБ, а затухание полосы останова 55 дБ. Установите двустороннюю полосу пропускания сигнала 2 кГц.
upConv = dsp.DigitalUpConverter(... 'InterpolationFactor',20,... 'SampleRate',Fs,... 'Bandwidth',2e3,... 'StopbandAttenuation',55,... 'PassbandRipple',0.2,... 'CenterFrequency',50e3);
Создайте модуль оценки спектра для визуализации спектра сигнала до и после преобразования с повышением частоты.
window = hamming(floor(length(x)/10)); figure; pwelch(x,window,[],[],Fs,'centered') title('Spectrum of baseband signal x')

Преобразование сигнала с повышением частоты и визуализация спектра.
xUp = upConv(x); window = hamming(floor(length(xUp)/10)); figure; pwelch(xUp,window,[],[],20*Fs,'centered') title('Spectrum of upconverted signal xUp')

Визуализация отклика интерполяционных фильтров.
visualizeFilterStages(upConv)

Объект выполняет выборку входного сигнала с использованием каскада из трех интерполяционных фильтров. Этот объект преобразует повышающую частоту сигнала путем умножения его на комплексную экспоненциальную с центральной частотой, равной значению в CenterFrequency собственность. В этом случае каскад фильтров состоит из этапа интерполяции КИО, второго этапа компенсации СИЦ и интерполятора СИЦ. На блок-схеме показана архитектура цифрового преобразователя.
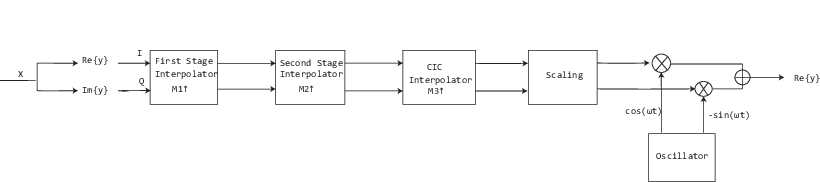
Секция масштабирования нормализует усиление CIC и мощность генератора. Он также может содержать поправочный коэффициент для достижения желаемой спецификации пульсации. В зависимости от настроек InterpolationFactor свойство, можно обойти первый этап фильтра. Когда входной тип данных является плавающей запятой, объект реализует N-секционный фильтр интерполяции CIC в качестве фильтра FIR с ответом, который соответствует каскаду N фильтров boxcar. CIC-фильтр эмулируется с помощью FIR-фильтра, что позволяет выполнять моделирование с данными с плавающей запятой. Когда входные данные имеют фиксированный тип, объект реализует истинный фильтр CIC с фактическими секциями гребенки и интегратора.
Диаграмма представляет арифметику DUC со входами с плавающей запятой.

Дополнительные сведения об операции с фиксированной точкой см. в разделе Фиксированная точка.
Примечания и ограничения по использованию:
См. Системные объекты в создании кода MATLAB (кодер MATLAB).
Этот объект также поддерживает создание кода SIMD с использованием технологии Intel AVX2, если входной сигнал имеет тип данных single или double.
Технология SIMD значительно повышает производительность генерируемого кода.
Блок-схема представляет арифметику DUC со знаком ввода с фиксированной точкой.
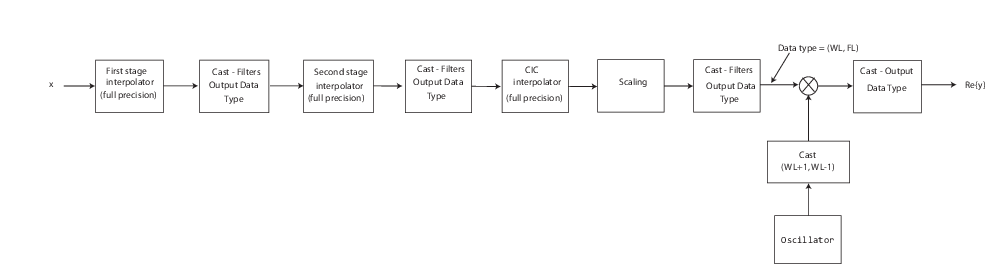
WL - длина слова на входе, FL - длина дроби на входе.
Выходные данные каждого фильтра приводятся к типу данных, указанному в FiltersOutputDataType и CustomFiltersOutputDataType свойства. Отливка выходного сигнала CIC происходит после применения коэффициента масштабирования.
Выходной сигнал генератора приводится к длине слова, равной FiltersOutputDataType длина слова плюс один. Длина фракции равна FiltersOutputDataType длина слова минус один.
Масштабирование на выходе интерполятора CIC состоит из грубой и тонкой регулировок усиления. Грубое усиление достигается с использованием reinterpretcast (Конструктор фиксированных точек) на выходе интерполятора CIC. Тонкий коэффициент усиления достигается с помощью умножения с полной точностью.
На рисунке показаны операции грубого и точного усиления.
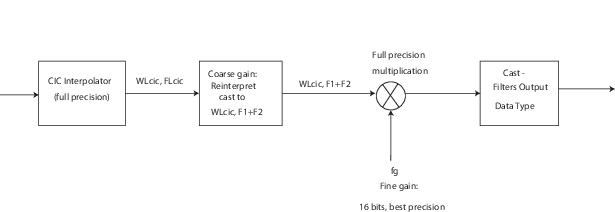
Если коэффициент усиления нормализации равен G (где 0<G≦1), то:
WLcic - длина слова на выходе интерполятора CIC, а FLcic - длина дроби на выходе интерполятора CIC.
F1 = abs(nextpow2(G)), указывая часть G, достигаемую с помощью битовых сдвигов (грубое усиление).
F2 - длина фракции, указанная FiltersOutputDataType и CustomFiltersOutputDataType свойства.
fg = fi((2^F1)*G,true,16), указывая, что оставшееся усиление не может быть достигнуто с битовым сдвигом (тонким усилением).
fvtool | generatehdl | getDecimationFactors | getFilterOrders | getFilters | groupDelay | visualizeFilterStages