Якобиан измерительной функции для движения с постоянной скоростью поворота
measurementjac = ctmeasjac(state)measurementjac, для модели движения фильтра Калмана с постоянной скоростью поворота в прямоугольных координатах. state указывает текущее состояние дорожки.
measurementjac = ctmeasjac(state,frame)frame.
measurementjac = ctmeasjac(state,frame,sensorpos)sensorpos.
measurementjac = ctmeasjac(state,frame,sensorpos,sensorvel)sensorvel.
measurementjac = ctmeasjac(state,measurementParameters)measurementParameters.
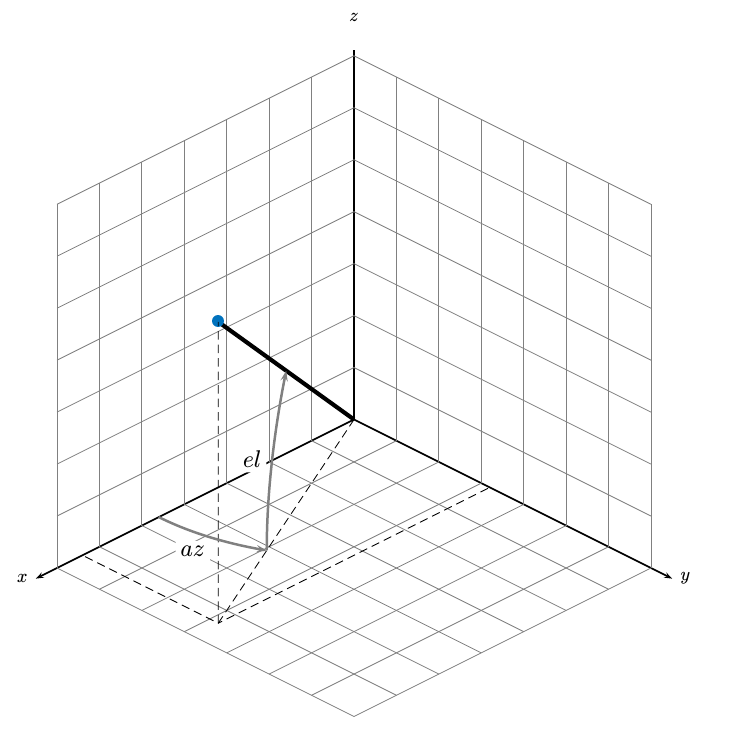
Определите азимут и углы отметки, используемые на панели инструментов.
Азимутальный угол вектора - это угол между осью x и ее ортогональной проекцией на плоскость xy. Угол положителен в направлении от оси x к оси y. Азимутальные углы лежат между -180 и 180 градусами. Угол места - это угол между вектором и его ортогональной проекцией на плоскость xy. При переходе к положительной оси Z от плоскости xy угол является положительным.
cameas | cameasjac | constacc | constaccjac | constturn | constturnjac | constvel | constveljac | ctmeas | cvmeas | cvmeasjac