В системе слежения датчики используются для генерации измерений или обнаружений от целей в окружающей среде. Датчики обычно имеют апертуру, с помощью которой они перехватывают энергию, которая либо излучается, либо отражается. Датчики в первую очередь используют перехваченную энергию для получения информации о состоянии и атрибутах целей.
Датчик является активным датчиком, если перехваченная энергия исходит от него самого, например, от моностатического радара или моностатического гидролокатора. Датчик является пассивным датчиком, если перехваченная энергия исходит от внешнего источника, такого как инфракрасный (ИК) датчик, который принимает излучаемую энергию от цели.
Помимо получения энергии целей, апертура неизбежно также собирает энергию помех, создаваемую либо природой (например, фоновым нагромождением), либо человеком (например, помеховым сигналом). Следовательно, качество обнаружения датчиков включает в себя множество факторов, таких как точность, разрешение, смещение и ложные сигналы тревоги. Кроме того, также важно учитывать обнаруживаемость датчиков, которая зависит от таких факторов, как пределы сканирования, поле зрения и установка датчиков в конструкции системы слежения.
В этом введении в основном обсуждается радар (включая fusionRadarSensor и radarEmitter объекты), но некоторые из следующих описаний также применимы к другим типам датчиков (включая irSensor, sonarSensor, и sonarEmitter объекты).
Для обнаружения цели радар использует радиосигналы, отраженные или испускаемые от цели. Учитывая различные конфигурации передатчика и приёмника, радар может иметь один из трёх режимов обнаружения: моностатический, бистатический, или меры электронной поддержки (ESM).
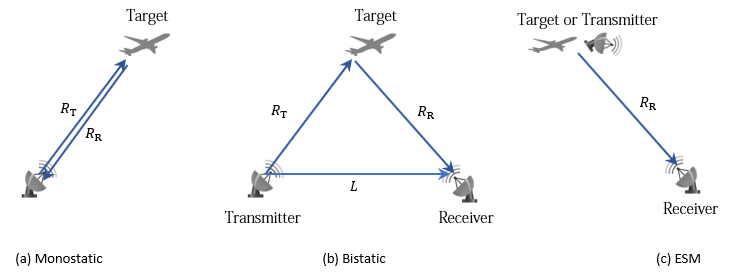
Для режима моностатического обнаружения передатчик и приемник совмещены, как показано на фигуре (а). В этом режиме измерение дальности R может быть выражено как R = RT = RR, где RT и RR являются диапазонами от передатчика до цели и от цели до приемника соответственно. В этом режиме измерение дальности составляет R = ct/2, где c - скорость света, а t - общее прошедшее время передачи сигнала. В дополнение к измерению дальности, моностатический датчик может также опционально сообщать измерения скорости дальности, азимута и высоты цели.
Для бистатического режима обнаружения передатчик и приемник разделены расстоянием L. Как показано на фигуре (b), сигнал излучается из передатчика, отражается от цели и в конечном итоге принимается приемником. Измерение бистатического диапазона Rb определяется как Rb = RT + RR − L. Радиолокационный датчик получает измерение бистатического диапазона как Rb = cΔt, где Δt - разность времени между перехватом приемником прямого сигнала от передатчика и перехватом отраженного сигнала от цели. В дополнение к измерению бистатического диапазона, бистатический радар может дополнительно сообщать измерения скорости, азимута и высоты бистатического диапазона цели. Поскольку бистатический диапазон и два угла подшипника (азимут и отметка) не соответствуют одному и тому же вектору положения, они не могут быть объединены в вектор положения и сообщены в декартовой системе координат. Без дополнительной информации бистатический датчик может сообщать об измерениях только в сферической системе координат.
Для режима обнаружения ESM приемник может перехватывать только сигнал, отраженный от цели или излучаемый непосредственно от передатчика, как показано на рис. (с). Поэтому единственными доступными измерениями являются азимут и высота цели или передатчика. Датчик ESM сообщает об этих измерениях в сферической системе координат.
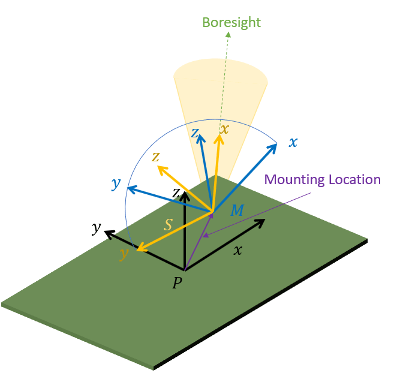
Чтобы интерпретировать обнаружение, генерируемое радаром, нужно понять, как радар монтируется на платформе. Основание рамы радиолокатора (М) может быть смещено от основания рамы платформы (Р). Это смещение обычно определяется MountingLocation свойство объекта-датчика, например, fusionRadarSensor. Рама для установки радара может также смещаться под углом от рамы платформы. Это угловое смещение, представляемое тремя углами поворота в последовательности z-y-x, можно задать с помощью команды MountingAngles собственность. Первоначально рама (S) радиолокационного сканирования совмещена с ее монтажной рамой (М). Однако когда радар начинает сканирование, он может сканировать вокруг осей z и y монтажной рамы. Направление х кадра радиолокационного обзора совмещено с текущим направлением визирования РЛС.
В большинстве случаев РЛС работает в режиме сканирования, в котором пучки датчиков стреляют назад и вперед, шириной, равной его полю обзора (ФОВ), через космическую область, определяемую пределом РЛС. FOV обычно составляет 3 децибела (дБ) ширины радиолокационного луча. Скорость подметания определяется параметром UpdateRate свойство объекта датчика. Скорость сканирования датчика можно получить с помощью поля его обзора и скорости обновления. Например, если частота обновления составляет 20 Гц, а поле зрения - 2 градуса, то скорость радиолокационного сканирования составляет 40 градусов в секунду. Дополнительные сведения об охвате датчиков радара см. в примере конфигурации режима радара сканирования.
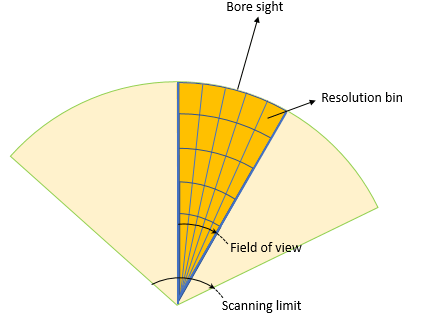
Разрешение датчика определяет способность датчика различать две цели. В 3-D пространстве разрешающая ячейка радара образована границей азимута, границей возвышения и границей дальности. Если две цели попадают в один и тот же бункер разрешения, то РЛС не может различить их и сообщает об этом как об одной цели при обнаружении.
Точность датчика можно описать стандартным отклонением погрешности измерения. На точность влияют в основном два фактора: отношение сигнал/шум (SNR) датчика и смещение детектирования датчика. SNR определяется как отношение мощности отраженного сигнала к мощности шума в децибелах (дБ). Отношение выше 1:1 (больше 0 дБ) указывает больше сигнала, чем шума. Большее SNR приводит к меньшей погрешности измерения и более высокой точности. Для РЛС SNR обычно является функцией сечения РЛС (RCS) цели. Смещение датчика обусловлено главным образом несовершенным выравниванием или калибровкой и часто считается постоянным значением. В каждом радиолокационном объекте можно задать смещение в виде доли размера ячейки разрешения датчика, используя такие свойства, как AzimuthBiasFraction. Чем больше смещение, тем больше ошибок включает в себя обнаружение.
Радар также может сделать неверную оценку региона наблюдения. Вероятность ложной тревоги (pFA) представляет вероятность того, что радар сообщает об обнаружении на ячейке разрешения, даже если ячейка разрешения не занята целью. Вероятность обнаружения (PD) представляет вероятность того, что радар сообщает об обнаружении на ячейке разрешения, если ячейка разрешения фактически занята целью. Поэтому 1 - PD представляет вероятность того, что цель не будет обнаружена РЛС. PD в основном является функцией SNR цели и pFA радара.
Когда радар работает в среде, где другие нежелательные радиочастотные (РЧ) излучения мешают сигналам, излучаемым радаром, радар может испытывать ухудшение характеристик обнаружения в направлении мешающих сигналов.
Во многих случаях радар имеет максимальный однозначный диапазон и пределы дальности. Если расстояние между целью и датчиком больше максимального однозначного диапазона, то датчик охватывает обнаруженный диапазон в диапазоне [0, Rmax], где Rmax - максимальный однозначный диапазон. Например, предположим, что диапазон Rt цели больше, чем Rmax, тогда сообщаемый диапазон цели равен mod(Rt, Rmax), гдеmod - остаток после функции деления в MATLAB. В радиолокационном объекте это ограничение можно отключить, установив HasMaxUnabmiguousRange свойство для false.
В части систем слежения существуют два основных класса измерений: кинематический и атрибутивный. Кинематические измерения обеспечивают системы сопровождения информацией о существовании и местонахождении цели. Типичные кинематические измерения включают диапазон, уровень диапазона, азимут и возвышение. Измерения атрибутов обычно содержат идентификацию и характеристики цели, такие как форма и отражательная способность. Кинематические измерения для РЛС описаны здесь.
В общем случае радар может сообщать о кинематических измерениях в сферических или декартовых координатных кадрах. Для сферических координат РЛС может сообщать измерения азимута, отметки, дальности и дальности. Для декартовых координат радар может сообщать измерения 2-D или 3-D положения и скорости на основе настройки. Каждый режим радиолокационного обнаружения может выводить только определенные виды измерений. Доступные координаты обнаружения для каждого режима обнаружения:
Для режима моностатического обнаружения об обнаружениях можно сообщать в сферических или декартовых координатных кадрах.
Для режима бистатического обнаружения об обнаружениях можно сообщать только в сферическом кадре координат, а сообщаемый диапазон - это бистатический диапазон до цели.
Для режима обнаружения ESM сообщения об обнаружениях могут быть только в сферическом кадре координат.
В панели инструментов Sensor Fusion and Tracking Toolbox объекты датчика выводят обнаруженные объекты в виде objectDetection объекты. Один objectDetection объект содержит следующие свойства:
| Собственность | Определение |
|---|---|
| Время | Время обнаружения |
| Измерение | Измерения объектов |
| Измерительный шум | Измерить ковариационную матрицу шума |
| SensorIndex | Уникальный идентификатор датчика |
| ObjectClassID | Уникальный идентификатор для классификации объектов |
| MeasurementParameters | Параметры, используемые для интерпретации измерений, такие как конфигурация датчика и информация о кадре обнаружения |
| ObjectAttributes | Дополнительная информация о целевом объекте, например, идентификатор целевого объекта и RCS целевого объекта |
Обратите внимание, что MeasurementParameters свойство содержит важную информацию, используемую для интерпретации измерений, такую как положение датчика (положение, скорость и ориентация) и информацию о координатных кадрах для измерений во время обнаружения. Дополнительные сведения см. в разделах Параметры измерения и Пример преобразования обнаружений в objectDetection Format.
