Если это еще не сделано, вызовите мастер косимуляции.
cosimWizard
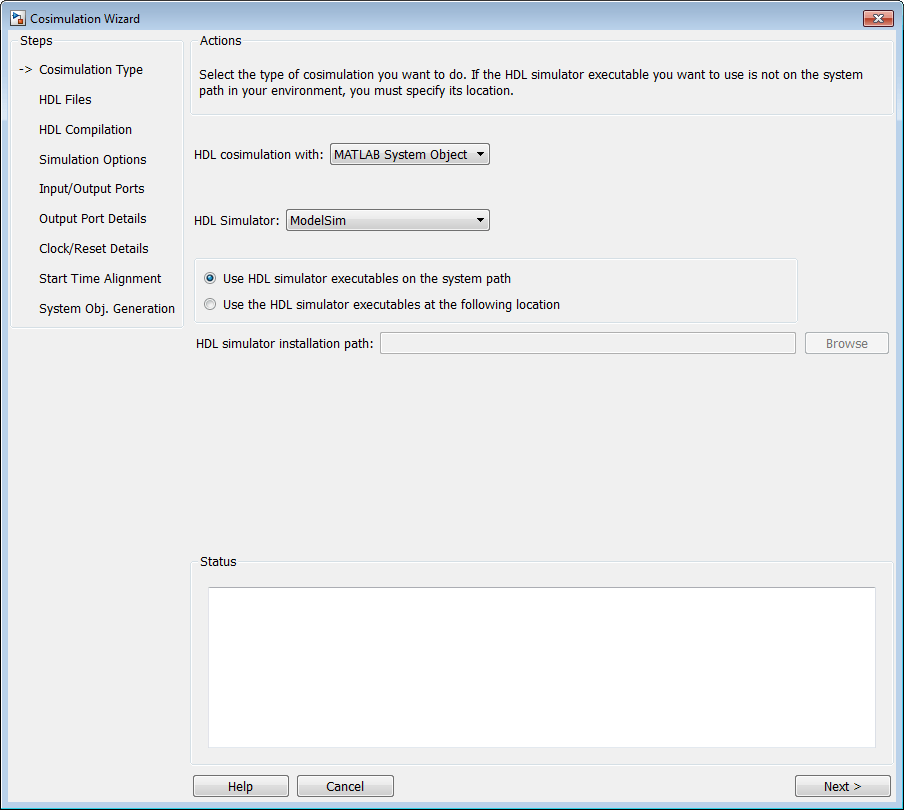
На панели «Тип косимуляции» выберите MATLAB System object в области косимуляции ЛПВП с.
Выбрать ModelSim или Incisive для имитатора ЛПВП.
Выберите Использовать исполняемые файлы имитатора HDL в системном пути, если в нем находятся файлы. Мастер косимуляции по умолчанию предполагает, что они находятся в системном пути.
Если исполняемые файлы имитатора HDL не находятся в системном пути, выберите Использовать следующие исполняемые файлы имитатора HDL в следующем расположении и укажите расположение папки в текстовом поле ниже.
Если нажать кнопку Далее, а мастер косимуляции не найдет исполняемые файлы, произойдет следующее:
Вы вернетесь в это диалоговое окно, и мастер косимуляции отобразит ошибку в области состояния.
Мастер косимуляции переключает параметр на Использовать следующие исполняемые файлы имитатора HDL в следующем расположении.
Мастер косимуляции делает поле пути моделирования HDL доступным для редактирования.
Перед продолжением необходимо ввести допустимый путь к исполняемым файлам имитатора HDL.
Нажмите кнопку Далее.
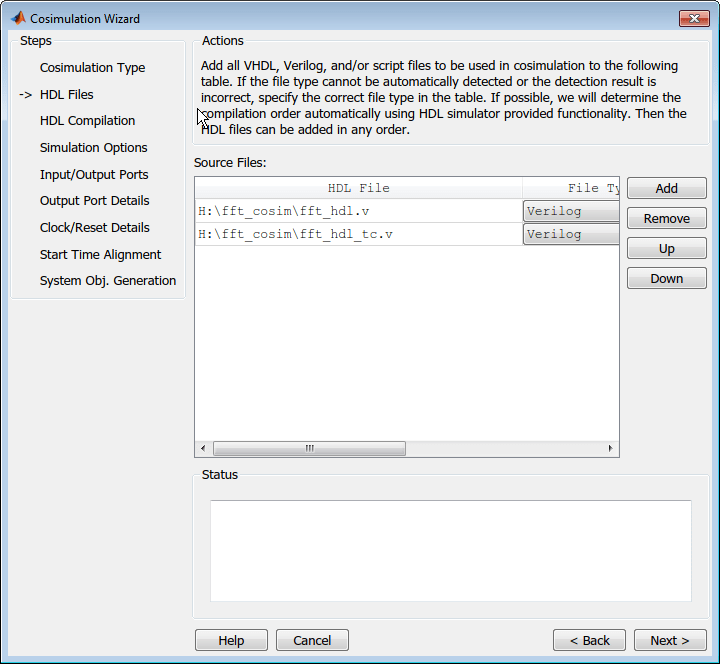
На панели «Файлы HDL» укажите файлы, которые будут использоваться при создании функции или блока.
Мастер косимуляции пытается определить тип каждого файла и отобразить его в списке файлов рядом с именем файла. Если мастер косимуляции не может определить тип или отображает неверный тип, можно изменить тип непосредственно в столбце Тип файла (File Type).
По возможности Мастер Cosimulation Wizard автоматически определит порядок компиляции с помощью функции имитатора HDL. Если симулятор не включает эту функцию, добавьте файлы в том порядке, в котором они должны быть скомпилированы.
При использовании ModelSim ® сценарии компиляции будут отображаться как файлы .do (файл макросов ModelSim). При использовании программы Insisive ® сценарии компиляции будут отображаться как системные сценарии.
Нажмите кнопку Добавить, чтобы выбрать одно или несколько имен файлов.
Удалите файлы, выделив имя файла в списке файлов, а затем щелкнув Удалить выбранный файл.
Нажмите кнопку Далее.
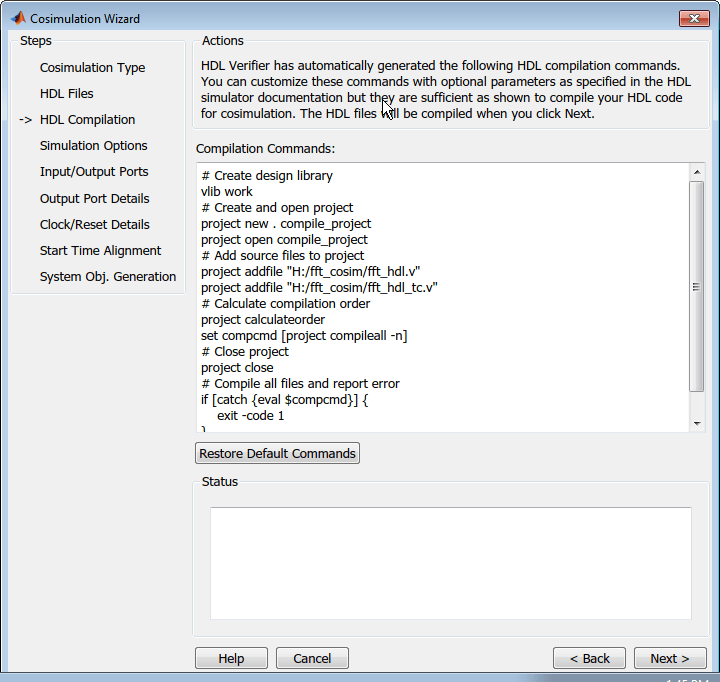
На панели Компиляция HDL (HDL Compilation) можно просмотреть сгенерированные команды компиляции HDL. При необходимости эти команды можно переопределить и/или настроить. Если вы включили сценарии компиляции вместо файлов HDL, на этой панели будет показана команда для запуска этих сценариев.
Введите все изменения в команды в поле «Команды компиляции».
Примечание
Не включайте команды оболочки системы; например:
set file = a.vhd vcom $file
Когда элемент управления возвращается к мастеру косимуляции из выполнения команды, переменная больше не содержит заданное значение. При попытке включить этот тип команды на панели «Состояние» появится сообщение об ошибке.
Щелкните Восстановить команды по умолчанию (Restore default commands), чтобы вернуться к созданным командам компиляции HDL. Вам предлагается подтвердить, что вы хотите отменить любые изменения.
Нажмите кнопку Далее, чтобы продолжить.
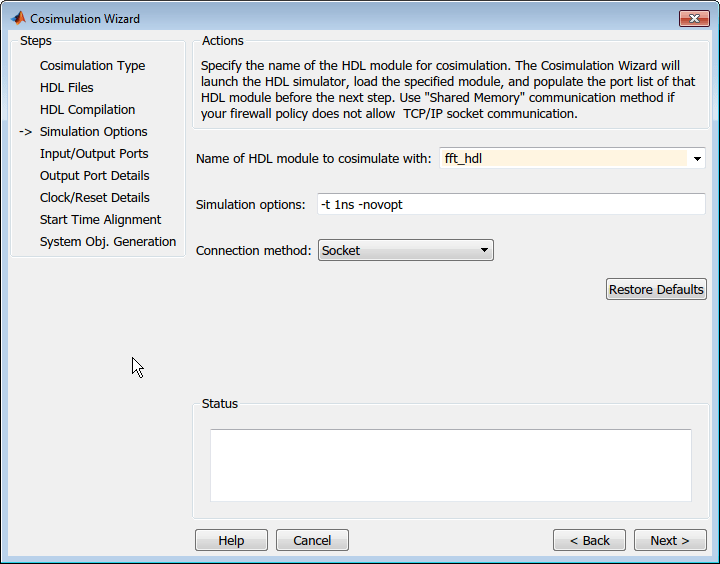
На панели модуля HDL укажите имя модуля HDL, который будет использоваться при косимуляции.
Введите имя модуля в поле Name of HDL module to cosimulate with.
Задайте дополнительные параметры моделирования в разделе Параметры моделирования. Например, на предыдущем изображении показаны следующие опции:
Разрешение имитатора ЛПВП
Отключить оптимизацию, удаляющую сигналы из вида моделирования
Щелкните Восстановить значения по умолчанию (Restore Defaults), чтобы вернуть параметры по умолчанию.
Для параметра «Метод подключения» выберите Shared Memory если политика брандмауэра не разрешает связь с сокетом TCP/IP.
Нажмите кнопку Далее, чтобы перейти к следующему шагу. В это время в командном окне приложение выполняет следующие действия:
Запуск имитатора ЛПВП.
Загрузка модуля ЛПВП в имитатор ЛПВП.
Запускает сервер HDL и ожидает уведомления о запуске сервера.
Подключается к серверу HDL для получения информации о порте.
Отключает и выключает сервер HDL.
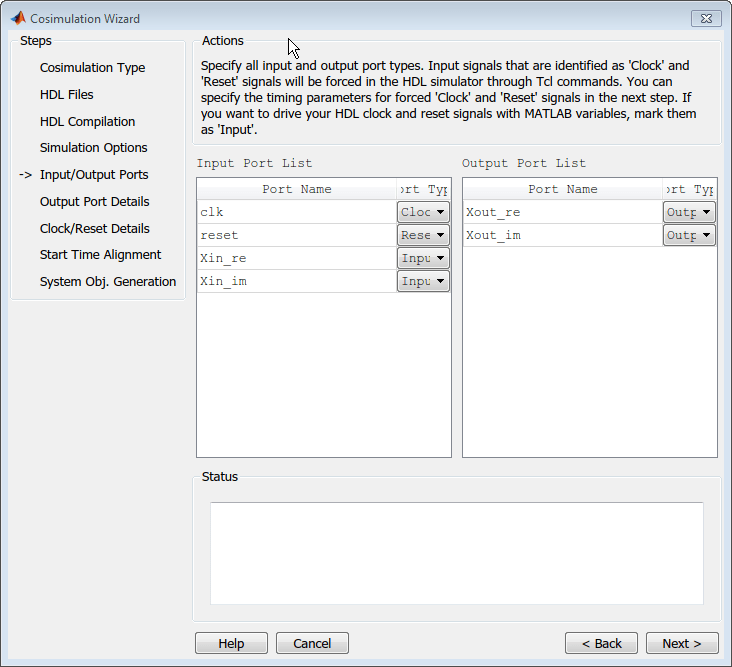
На панели «Порты ввода/вывода» укажите тип каждого порта ввода и вывода (Input, Clock, Reset, или Unused).
Мастер косимуляции пытается определить типы портов, но можно переопределить любой параметр.
MATLAB ® заставляет сигналы синхронизации и сброса в имитаторе ЛПВП с помощью команд РУД. На более позднем шаге можно указать время синхронизации и сброса сигнала (см. Подробные данные синхронизации/сброса - объект системы MATLAB ).
Нажмите кнопку Далее.
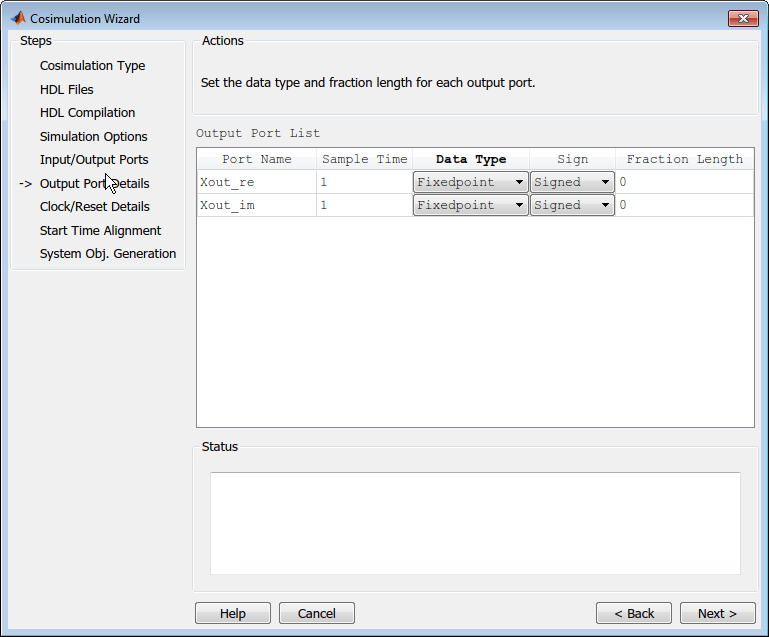
На панели «Сведения о выходном порте» задайте время выборки и тип данных для всех выходных портов.
Время выборки по умолчанию - 1, тип данных по умолчанию: Inherit и Signed. Эти значения по умолчанию согласуются с тем, как маска блока косимуляции HDL (вкладка «Порты») устанавливает настройки по умолчанию для портов вывода (workflow-процесс Simulink ®).
При выборе параметра Set all sample time and data types to 'Inherit' порты наследуют время через обратное распространение (sample time имеют значение -1). Однако при некоторых обстоятельствах обратное распространение может потерпеть неудачу; см. раздел Обратное распространение в Sample Times (Simulink).
Нажмите кнопку Далее.
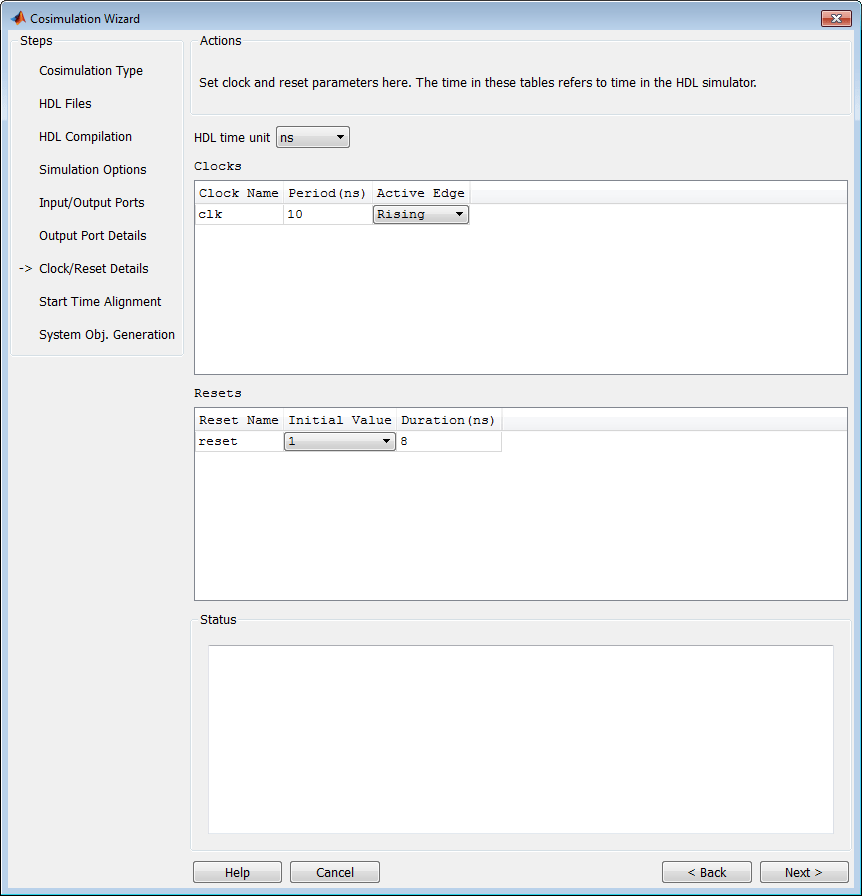
На панели «Сведения о часах/сбросах» установите параметры часов и сброса.
Указанный здесь период времени относится к времени в имитаторе ЛПВП.
Настройки по умолчанию тактовых импульсов - это восходящий активный фронт и период 10 нс.
Параметры сброса по умолчанию имеют начальное значение 0 и длительность 15 нс.
На следующем экране отображается время начала моделирования, на котором можно просмотреть, как синхронизируются и сбрасываются часы.
Нажмите кнопку Далее.
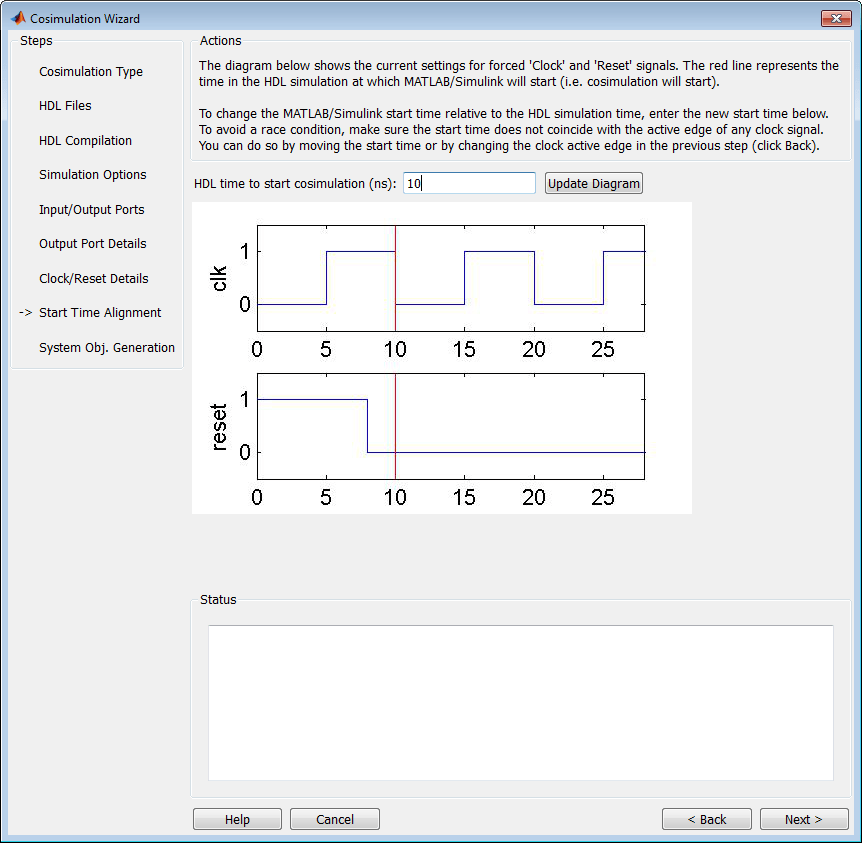
На панели «Выравнивание по времени начала» просмотрите текущие настройки часов и сбросов. Цель этого диалога состоит в следующем:
Чтобы убедиться, что вертикальный или задний край установлен так, как ожидалось (из предыдущего шага)
Проверьте время начала. При совпадении с активным фронтом часов необходимо отрегулировать время запуска имитатора ЛПВП.
Проверьте сигнал сброса. Если он синхронизирован с активным фронтом часов, возможно, имеется возможное состояние гонки.
Чтобы избежать условий гонки, убедитесь, что время начала не совпадает с активным краем каких-либо часов. Это можно сделать, переместив время начала или изменив активные границы часов на предыдущем шаге.
Чтобы убедиться, что время начала находится в нужном месте.
Время запуска имитатора ЛПВП рассчитывается на основе значений часов и сброса на предыдущей панели. При необходимости можно изменить время запуска имитатора ЛПВП, введя новое значение, в котором отображается время запуска косимуляции ЛПВП (ns). Щелкните Обновить график (Update plot), чтобы увидеть примененное изменение.
Нажмите кнопку Далее.
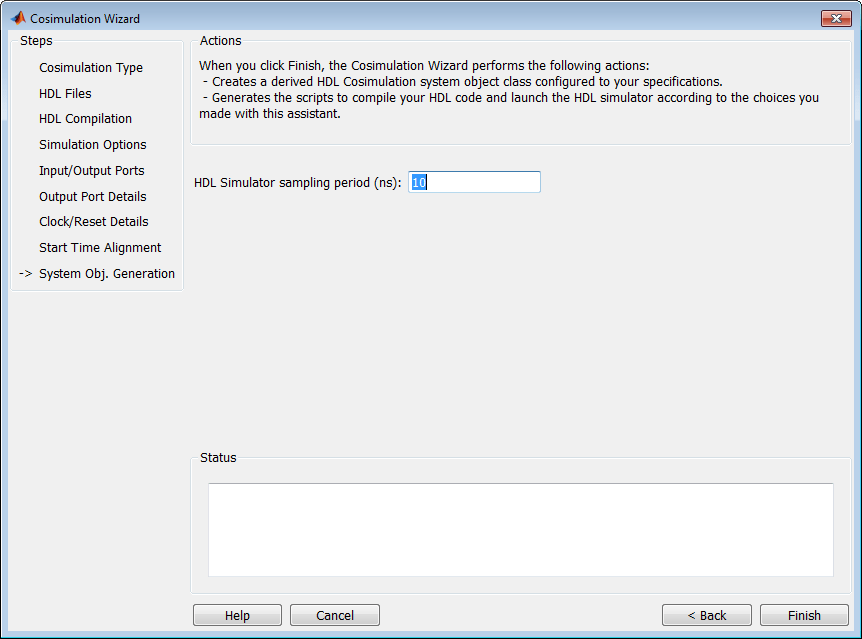
Период выборки имитатора HDL можно изменить до того, как мастер создаст системный object™. Введите новое значение в поле «Период выборки имитатора HDL (ns)».
Период выборки определяет прошедшее время в имитаторе ЛПВП, разделяющем каждый вызов на шаг в MATLAB. Большую часть времени период выборки равен периоду синхронизации.
Если входные и выходные данные основаны на кадрах (а не на образцах), выберите Frame based processing.
Нажмите кнопку Готово (Finish).
После нажатия кнопки Готово мастер создает следующие файлы HDL в текущем каталоге:
compile_hdl_design_ - Сценарий для перекомпиляции конструкции ЛПВПdesign_name.m
launch_hdl_simulator_ - Сценарий для перезапуска сервера объектов системы MATLAB и запуска имитатора HDLdesign_name.m
hdlcosim_ - Сценарий для создания design_name.mHDLCosimulation Системный объект
Запишите тестовый стенд для использования с вновь созданным объектом системы косимуляции HDL. Тестовый стенд, который вы пишете, может выглядеть аналогично примеру, приведенному ниже.
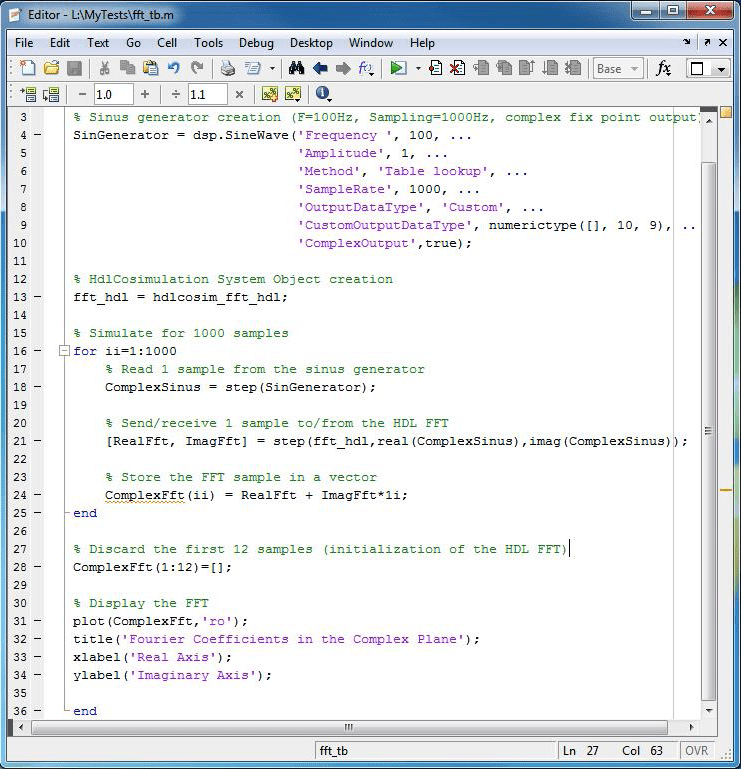
Файлы, используемые в этом примере, см. в разделе Мастер косимуляции для системного объекта MATLAB.
Запустите имитатор ЛПВП, выполнив сценарий запуска, созданный мастером (launch_hdl_simulator_)design_name.m
Когда имитатор ЛПВП будет готов, вернитесь в MATLAB и запустите моделирование, выполнив тест-стенд.
Проверьте результаты.
