Преобразование вентиляторных выступов в параллельные
P = fan2para(F,D,Name,Value)
[ возвращает расположение датчика с параллельным лучом в P,parallel_sensor_positions,parallel_rotation_angles] = fan2para(___)parallel_sensor_positions и углы поворота в parallel_rotation_angles.
Создание синтетических данных о параллельных балках.
ph = phantom(128);
Вычислите параллельное преобразование луча и отобразите его.
theta = 0:179; [Psynthetic,xp] = radon(ph,theta); imshow(Psynthetic,[],... 'XData',theta,'YData',xp,'InitialMagnification','fit') axis normal title('Synthetic Parallel-Beam Data') xlabel('\theta (degrees)') ylabel('x''') colormap(gca,hot), colorbar

Преобразуйте данные параллельной балки в веерную балку.
Fsynthetic = para2fan(Psynthetic,100,'FanSensorSpacing',1);Восстановление исходных данных параллельного луча.
[Precovered,Ploc,Pangles] = fan2para(Fsynthetic,100,... 'FanSensorSpacing',1,... 'ParallelSensorSpacing',1); figure imshow(Precovered,[],... 'XData',Pangles,'YData',Ploc,'InitialMagnification','fit') axis normal title('Recovered Parallel-Beam Data') xlabel('Rotation Angles (degrees)') ylabel('Parallel Sensor Locations (pixels)') colormap(gca,hot), colorbar

F - Данные проекции луча вентилятораДанные проекции веера-луча, заданные как числовая матрица. Каждый столбец F содержит данные веерной балки под одним углом поворота. Количество столбцов указывает на количество углов поворота вентиляторной балки, а количество строк - на количество датчиков вентиляторной балки.
Типы данных: double | single
D - Расстояние от вершины балки вентилятора до центра вращенияРасстояние в пикселях от вершины луча вентилятора до центра вращения, заданное как положительное число. fan2para предполагает, что центр вращения является центральной точкой проекций, которая определяется как ceil(size(F,1)/2). Рисунок иллюстрирует D относительно вершины веер-балки для одной проекции веер-балки.
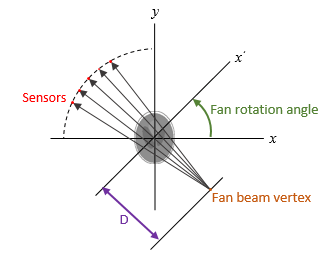
Типы данных: double | single
Укажите дополнительные пары, разделенные запятыми Name,Value аргументы. Name является именем аргумента и Value - соответствующее значение. Name должен отображаться внутри кавычек. Можно указать несколько аргументов пары имен и значений в любом порядке как Name1,Value1,...,NameN,ValueN.
P = fan2para(F,D,'FanRotationIncrement',5)Приращение угла поворота балки вентилятора в градусах, указанное как пара, разделенная запятыми, состоящая из 'FanRotationIncrement' и положительный скаляр.
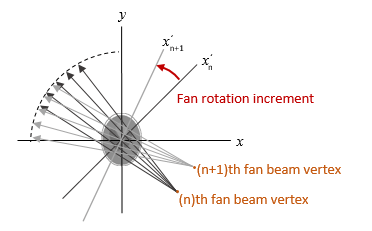
Типы данных: double
Расположение датчика луча вентилятора, указанное как пара, разделенная запятыми, состоящая из 'FanSensorGeometry' и одно из следующих значений.
Стоимость | Значение | Диаграмма |
|---|---|---|
| Датчики разнесены под равными углами по дуге окружности на расстояние
| 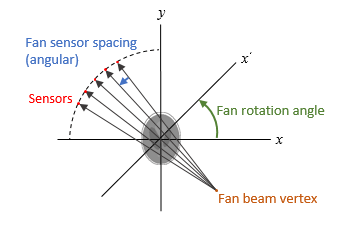 |
| Датчики разнесены на равные расстояния вдоль линии, параллельной оси x '. Ближайший датчик - расстояние
| 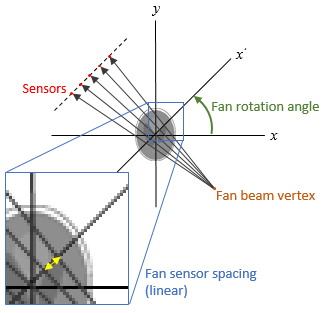 |
'Interpolation' - Тип интерполяции'Linear' (по умолчанию) | 'nearest' | 'spline' | 'pchip'Тип интерполяции, используемой между данными параллельного луча и веерного луча, определяемый как разделенная запятыми пара, состоящая из 'Interpolation' и одно из этих значений.
'nearest' - Ближайший сосед
'linear' - Линейный (по умолчанию)
'spline' - Кусочно-кубический сплайн
'pchip' - Кусочно-кубический эрмит (PCHIP)
'ParallelCoverage' - Диапазон вращения параллельной балки'halfcycle' (по умолчанию) | 'cycleДиапазон вращения параллельного луча, определяемый как разделенная запятыми пара, состоящая из 'ParallelCoverage' и одно из этих значений.
'cycle' - Параллельные данные охватывают весь диапазон [0, 360) градусов.
'halfcycle' - Параллельные данные охватывают [0, 180) градусов.
'ParallelRotationIncrement' - Приращение угла поворота параллельной балкиПриращение угла поворота параллельного луча в градусах, указанное как пара, разделенная запятыми, состоящая из 'ParallelRotationIncrement' и положительный скаляр k, такой, что 180/k - целое число. Если не указать ParallelRotationIncrement, тогда значение по умолчанию равно FanRotationIncrement.
Типы данных: double
'ParallelSensorSpacing' - Расстояние между параллельно-балочными датчикамиРасстояние между датчиками параллельного луча в пикселях, указанное как пара, разделенная запятыми, состоящая из 'ParallelSensorSpacing' и положительный скаляр. Диапазон расположений датчиков параллельного луча вычисляется из диапазона углов вентилятора, фанангов, по: [.D*sin(min(fanangles)) D*sin(max(fanangles))]
Если не указать ParallelSensorSpacing, тогда расстояние принимается однородным и устанавливается равным минимальному расстоянию, подразумеваемому углами вентилятора, и отбирается в диапазоне, подразумеваемом углами вентилятора.
Типы данных: double
