Обратное вееролучное преобразование
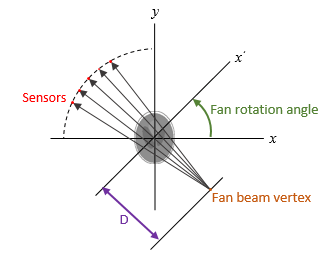
I = ifanbeam(F,D)I из данных проекции луча вентилятора в F. Каждый столбец F содержит данные проекции луча вентилятора под одним углом поворота. Угол между датчиками принят равномерным и равным приращению между углами поворота луча вентилятора. D - расстояние от вершины веерной балки до центра вращения.
I = ifanbeam(F,D,Name,Value)
Создайте образец изображения. phantom создает фантомное изображение головы.
ph = phantom(128);
Создайте трансформацию фантомной головки.
d = 100; F = fanbeam(ph,d);
Восстановите фантомное изображение головки из представления веера-луча. Отображение исходного изображения и восстановленного изображения.
I = ifanbeam(F,d); imshow(ph)

figure imshow(I);

Создайте образец изображения. Фантомная функция создает фантомное изображение головы.
ph = phantom(128);
Создайте радоновое преобразование изображения.
P = radon(ph);
Преобразование из параллельной проекции балки в вентиляторную проекцию.
[F,obeta,otheta] = para2fan(P,100,... 'FanSensorSpacing',0.5,... 'FanCoverage','minimal',... 'FanRotationIncrement',1);
Восстановите изображение из данных веерной балки.
phReconstructed = ifanbeam(F,100,... 'FanSensorSpacing',0.5,... 'Filter','Shepp-Logan',... 'OutputSize',128,... 'FanCoverage','minimal',... 'FanRotationIncrement',1);
Отображение оригинала и преобразованного изображения.
imshow(ph)

figure imshow(phReconstructed)

F - Данные проекции луча вентилятораДанные проекции веера-луча, заданные как числовая матрица числовых значений по числовым значениям. numsensors - количество датчиков вентиляторного луча, numangles - число углов поворота вентиляторного луча. Каждый столбец F содержит образцы датчика луча вентилятора под одним углом поворота.
Типы данных: double | single
D - Расстояние от вершины балки вентилятора до центра вращенияРасстояние в пикселях от вершины веерного луча до центра вращения, заданное как положительное число. ifanbeam предполагает, что центр вращения является центральной точкой проекций, которая определяется как ceil(size(F,1)/2). Рисунок иллюстрирует D относительно вершины веер-балки для одной проекции веер-балки.
Типы данных: double | single
Укажите дополнительные пары, разделенные запятыми Name,Value аргументы. Name является именем аргумента и Value - соответствующее значение. Name должен отображаться внутри кавычек. Можно указать несколько аргументов пары имен и значений в любом порядке как Name1,Value1,...,NameN,ValueN.
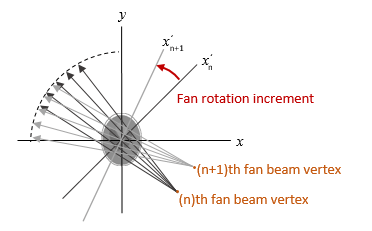
I = ifanbeam(F,D,'FanRotationIncrement',5)Приращение угла поворота балки вентилятора в градусах, указанное как пара, разделенная запятыми, состоящая из 'FanRotationIncrement' и положительный скаляр.
Типы данных: double
Расположение датчика луча вентилятора, указанное как пара, разделенная запятыми, состоящая из 'FanSensorGeometry' и одно из следующих значений.
Стоимость | Значение | Диаграмма |
|---|---|---|
| Датчики разнесены под равными углами по дуге окружности на расстояние
| 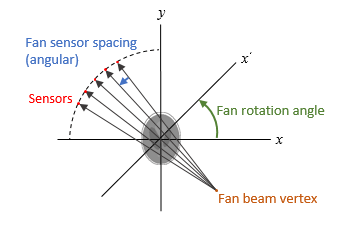 |
| Датчики разнесены на равные расстояния вдоль линии, параллельной оси x '. Ближайший датчик - расстояние
| 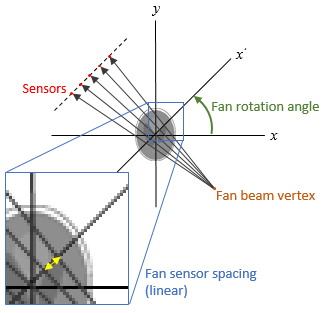 |
'Filter' - Фильтр'Ram-Lak' (по умолчанию) | 'Shepp-Logan' | 'Cosine' | 'Hamming' | 'Hann' | 'None'Фильтр для фильтрации в частотной области, указанный как разделенная запятыми пара, состоящая из 'Filter' и одно из значений в таблице. Дополнительные сведения см. в разделе iradon.
Стоимость | Описание |
|---|---|
| Обрезанный Ram-Lak или наклонный фильтр. Частотная характеристика этого фильтра - | |
| Умножает фильтр Ram-Lak на |
| Умножает фильтр Ram-Lak на |
| Умножает фильтр Ram-Lak на окно Хэмминга |
| Умножает фильтр Ram-Lak на окно Ханна |
'None' | Фильтрация отсутствует. ifanbeam возвращает нефильтрованные данные. |
Типы данных: char | string
'FrequencyScaling' - Масштабный коэффициент1 (по умолчанию) | положительное число в диапазоне (0, 1]Масштабный коэффициент для масштабирования частотной оси, определяемый как разделенная запятыми пара, состоящая из 'FrequencyScaling' и положительное число в диапазоне (0, 1]. Если ' меньше 1, то фильтр сжимается, чтобы вписаться в частотный диапазон FrequencyScaling'[0,FrequencyScaling], в нормированных частотах; все частоты выше FrequencyScaling имеют значение 0. Дополнительные сведения см. в разделе iradon.
Типы данных: double
'Interpolation' - Тип интерполяции'Linear' (по умолчанию) | 'nearest' | 'spline' | 'pchip'Тип интерполяции, используемой между данными параллельного луча и веерного луча, определяемый как разделенная запятыми пара, состоящая из 'Interpolation' и одно из следующих значений.
'nearest' - Ближайший сосед
'linear' - Линейный (по умолчанию)
'spline' - Кусочно-кубический сплайн
'pchip' - Кусочно-кубический эрмит (PCHIP)
Типы данных: char | string
'OutputSize' - Размер реконструированного изображенияРазмер реконструированного изображения, определяемый как разделенная запятыми пара, состоящая из 'OutputSize' и положительное целое число. Изображение имеет равное количество строк и столбцов.
При указании OutputSize, то ifanbeam восстанавливает меньшую или большую часть изображения, но не изменяет масштаб данных.
Примечание
Если прогнозы были рассчитаны с помощью fanbeam функция, то восстановленное изображение может быть не такого же размера, как исходное изображение.
Если не указать OutputSize, то размер рассчитывается автоматически по:
OutputSize = 2*floor(size(R,1)/(2*sqrt(2)))где R - длина данных проекции параллельного луча, используемых iradon. Дополнительные сведения см. в разделе Алгоритмы.
Типы данных: double
ifanbeam преобразует данные веерного луча в параллельные проекции луча, а затем использует алгоритм отфильтрованной проекции для выполнения обратного преобразования Радона. Фильтр конструируется непосредственно в частотной области и затем умножается на БПФ проекций. Проекции заполняются нулями до степени 2 перед фильтрацией, чтобы предотвратить сглаживание пространственной области и ускорить БПФ.
[1] Kak, A. C., и М. Слэни, принципы компьютеризированного томографического отображения, Нью-Йорка, Нью-Йорка, IEEE Press, 1988.
