Навигационное исправление на основе Mercator
[latfix,lonfix] = navfix(lat,long,az)
[latfix,lonfix] = navfix(lat,long,range,casetype)
[latfix,lonfix] = navfix(lat,long,az_range,casetype)
[latfix,lonfix] = navfix(lat,long,az_range,casetype,drlat,drlon)
[latfix,lonfix] = navfix(lat,long,az) возвращает точки пересечения линий румба, проведённых параллельно наблюдаемым подшипникам, az, из ориентиров, расположенных в точках lat и long и проходя через эти точки. Для каждого ориентира требуется один подшипник. Каждое возможное спаривание n ориентиров генерирует одно пересечение, так что общее количество результирующих точек пересечения является комбинаторным n выбрать 2. Следовательно, время вычисления быстро растет с n.
[latfix,lonfix] = navfix(lat,long,range,casetype) возвращает точки пересечения окружностей проекции Меркатора с радиусами, определенными range, с центром на ориентирах, расположенных в точках lat и long. Для каждого ориентира требуется одно значение диапазона. Каждое возможное спаривание n ориентиров порождает до двух пересечений (окружности могут пересекаться дважды), поэтому общее количество результирующих точек пересечения является комбинаторным 2 раза (n выберем 2). Поэтому время вычисления быстро растет с n. В этом случае переменная casetype является вектором 0s того же размера, что и переменная range.
[latfix,lonfix] = navfix(lat,long,az_range,casetype) сочетает в себе диапазоны и подшипники. Для каждого элемента casetype равный 1, соответствующий элемент az_range представляет азимут к связанному ориентиру. Где casetype является 0, az_range - диапазон.
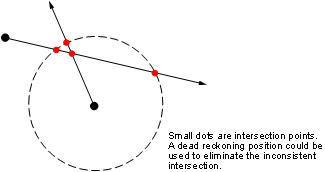
[latfix,lonfix] = navfix(lat,long,az_range,casetype,drlat,drlon) возвращает для каждого возможного спаривания ориентиров только то пересечение, которое лежит ближе всего к мертвой позиции расплаты, указанной drlat и drlon. При использовании этого синтаксиса все включенные опорные линии ориентиров или дуги диапазона должны пересекаться. При сбое любого возможного соединения предупреждение No Fix отображается.
Это навигационная функция. Предполагается, что все широты и долготы находятся в градусах, а все расстояния - в морских милях. В мореплавании пилотирование - практика фиксации своего положения на основе наблюдаемого пеленга и дальности до фиксированных ориентиров (точек суши, маяков, дымовых эстакад и др.) с судна штурмана. В соответствии с навигационной практикой подшипники рассматриваются как румбовые линии, а диапазоны - как радиусы окружностей на проекции Меркатора.
На практике, по меньшей мере, три азимута (подшипника) и/или диапазона требуются для пригодного для использования крепления. Полученные пересечения вряд ли будут точно совпадать. Для получения более полного описания использования этой функции см. раздел Навигация в руководстве пользователя панели инструментов сопоставления.
Для получения полного примера применения этой функции см. раздел «Навигация» в Руководстве пользователя панели инструментов отображения.
Представьте, что у вас есть два ориентира: (15ºN,30.4ºW) и (14 8ºN, 30 .1ºW). У вас есть визуальный подшипник к первому из 280 ° и ко второму из 160 °. Кроме того, имеется диапазон до второй из 12 нм. Найдите точки пересечения:
[latfix,lonfix] = navfix([15 14.8 14.8],[-30.4 -30.1 -30.1],...
[280 160 12],[1 1 0])
latfix =
14.9591 NaN
14.9680 14.9208
14.9879 NaN
lonfix =
-30.1599 NaN
-30.2121 -29.9352
-30.1708 NaNВот иллюстрация геометрии:
Традиционное построение графиков и navfix функции ограничены относительно короткими расстояниями. Визуальные подшипники на самом деле большие азимуты окружности, а не румбовые линии, и дуги диапазона на самом деле являются дугами небольших кругов, а не плоских кругов, нанесенных на график. Однако механическая простота процесса и практические пределы визуальных диапазонов пеленгов и навигационных радиолокационных диапазонов (~ 30 нм) делают это ограничение спорным на практике. Ошибка, вызванная этими предположениями, мизерна в таком масштабе.
Выходами этой функции являются матрицы, обеспечивающие расположение пересечений для всех возможных пар n введенных линий дуги подшипника и дуги диапазона. Поэтому эти матрицы имеют n-choose-2 строк. Чтобы разрешить два пересечения на комбинацию, эти матрицы имеют два столбца. Всякий раз, когда для этой комбинации имеется менее двух пересечений, в этой строке возвращается один или два NaNs.
Если включена позиция нечувствительности, эти матрицы являются векторами столбцов.
