Векторы представляют такие величины, как скорость и ускорение. Функции картографирования Toolbox™ преобразуют векторные компоненты между системами с земной привязкой (ECEF) и east-north-up (ENU) или north-east-down (NED). Дополнительные сведения о системах координат ECEF, ENU и NED см. в разделе Выбор системы координат 3-D.
В отличие от координат, измеряющих положение, векторные компоненты в декартовой системе не зависят от положения в пространстве. Поэтому при преобразовании вектора из одной системы в другую изменяются только компоненты вектора. Величина вектора остается прежней.
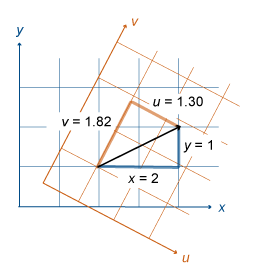
Например, на этом изображении показано преобразование вектора 2-D из системы x-y в систему u-v. Вектор имеет компоненты x = 2 и y = 1 в системе x-y, а компоненты u = 1,30 и v = 1,82 в системе u-v. Компоненты вектора различны, но в каждой системе величина вектора равна 2,24 единицы.
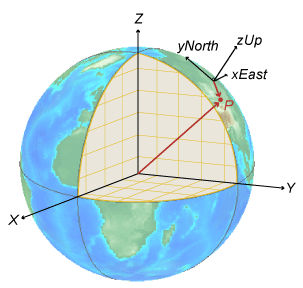
На этом рисунке показано преобразование координат из глобальной системы ECEF в локальную систему RUS с использованием ecef2enu. Векторы положения начинаются в начале каждой системы и заканчиваются в точке P. Поэтому преобразование изменяет величину вектора положения.
На этом рисунке показано преобразование вектора из глобальной системы ECEF в локальную систему RUS с использованием ecef2enuv. Вектор r не зависит от положения. Поэтому преобразование изменяет компоненты вектора, но величина вектора одинакова.
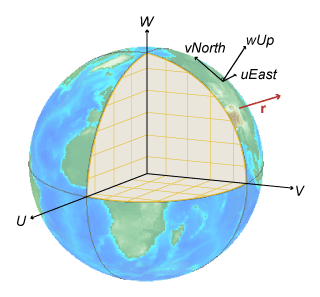
В отличие от функций преобразования координат, таких как ecef2enu, функции векторного преобразования, такие как ecef2enuv не требуется указывать ссылочный сфероид или эллипсоидальную высоту локального начала координат. Геодезическая широта и долгота локального начала координат достаточны для определения ориентации осей uEast, vNorth и wUp.
ecef2enuv | ecef2nedv | enu2ecefv | ned2ecefv
