Уменьшенная форма эшелона ряда (ликвидация Гаусса-Иордана)
rank, orth, и null являются обычно более быстрыми и более точными для вычисления ранговых и базисных векторов матрицы.
mldivide рекомендуется для решения линейных систем.
Частичный поворот - это практика выбора элемента столбца с наибольшим абсолютным значением в столбце поворота, а затем замены строк матрицы так, чтобы этот элемент находился в положении поворота (самый левый ненулевой элемент в строке).
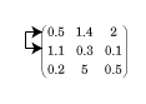
Например, в матрице ниже алгоритм начинается с идентификации наибольшего значения в первом столбце (значение в позиции (2,1), равное 1.1), а затем изменяет полную первую и вторую строки таким образом, что это значение появляется в позиции (1,1).
Использование частичного поворота в гауссовом устранении уменьшает (но не устраняет) ошибки округления в расчете.
rref реализует ликвидацию Гаусса-Джордана с частичным поворотом. Допуск по умолчанию max(size(A))*eps*norm(A,inf) проверка ничтожных элементов столбцов, обнуленных для уменьшения погрешности округления.
