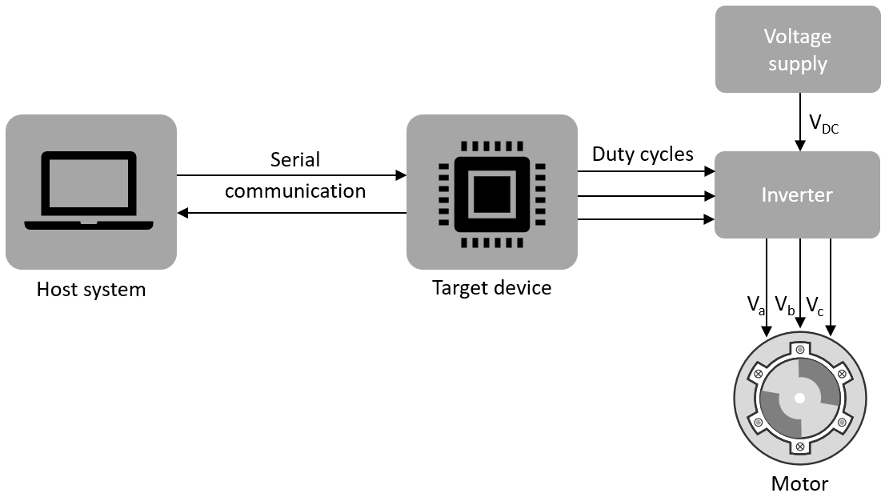
Blockset™ управления двигателем использует интерфейс связи между главной моделью и целевой моделью для управления двигателем и наблюдения обратной связи.
Модель хоста представляет собой пользовательский интерфейс для платы аппаратных средств контроллера. Запустите модель хоста на хост-компьютере. Перед запуском модели хоста на хост-компьютере убедитесь, что целевая модель развернута на аппаратной плате контроллера.
Главная модель командует, управляет и обменивается данными с целевым оборудованием. Можно выполнить следующие операции с использованием главной модели, доступной в блоке управления двигателем:
Найдите последовательный порт связи (COM-порт) в хост-системе. Дополнительные сведения см. в разделе Поиск порта связи на этой странице.
Настройте последовательный порт и скорость передачи в бодах с помощью блока Serial Setup.
Запустите или остановите двигатель.
Укажите скорость двигателя.
Просмотрите отладочные или выходные сигналы, которые хост получает от целевого объекта с помощью блоков Time Scope и Display.
Целевая модель выполняется на аппаратной плате контроллера. Развертывание целевой модели на встроенном целевом оборудовании, которое управляет двигателем. Целевая модель взаимодействует с главной моделью для получения команд от пользователя (например, команды запуска или остановки двигателя). Некоторые обычные операции, выполняемые целевой моделью, доступной в блоке управления двигателем:
Последовательная связь с моделью хоста для приема команд пользователя и обмена двоичными данными.
Считывайте данные с датчиков положения и тока, подключенных к двигателю и инвертору.
Управление скоростью и крутящим моментом двигателя путем выполнения алгоритмов управления и обработки обратной связи.
Создайте входы рабочего цикла для инвертора.
Включить быстрый последовательный мониторинг данных для отладки сигналов.
Главная и целевая модели взаимодействуют с помощью следующих блоков блоков управления двигателем, которые обеспечивают последовательную связь:
Получение последовательного хоста
Настройка последовательного узла
Последовательная передача хоста
С помощью этих блоков можно контролировать, контролировать и настраивать работу двигателя в режиме реального времени. Например, можно просматривать сигналы отладки, останавливать или запускать двигатель и изменять скорость двигателя без повторного развертывания целевой модели.
В примерах модельных блоков Motor Control Blockset используется алгоритм быстрого последовательного мониторинга данных, который выполняет операции управления и диагностики через модель хоста. Этот алгоритм позволяет наблюдать данные от целевого устройства с той же скоростью, что и время выборки выполнения (например, частота ШИМ 20 кГц). Это, в свою очередь, помогает в диагностике и анализе переходных процессов.
Платы оценки часто обеспечивают последовательную связь по USB-соединениям, что обеспечивает быструю последовательную передачу данных. Модели, работающие на аппаратных платах Texas Instruments™ LaunchPad, посылают сигналы, такие как токи Ia и Ib, по последовательному интерфейсу. Используйте модель хоста для приема этих сигналов на хост-компьютер. Устройство управления двигателем осуществление Blockset в качестве примера алгоритм Field Oriented Control (FOC) для использования F28379D LaunchPad mcb_pmsm_foc_host_model_f28379d.slx. Примеры реализации алгоритма ВОК для целей F28069M, использование mcb_pmsm_foc_host_model_f28069m.slx. Блок управления двигателем также предоставляет другие модели хостов для примеров на основе приложений.
Выбор COM-порта и скорости передачи в бодах
Выберите соответствующий COM-порт, соответствующий вашей плате, в блоке Serial Setup модели хоста. Настройте скорость передачи для вашей платы:
| Texas Instruments LaunchPad | Скорость передачи в бодах |
|---|---|
F28027 LaunchPad | 3.75e6 |
F28069 LaunchPad | 5.625e6 |
F28377S LaunchPad | 12e6 |
F28379D LaunchPad | 12e6 |
После развертывания целевой модели на целевом устройстве запустите главную модель и просмотрите обновление сигналов отладки на частоте 20 кГц в области времени. Этот же метод можно использовать для контроля других сигналов на других процессорах.
Примечание
SCI_A обычно подключается к микросхеме FTDI, которая обеспечивает последовательную передачу по USB на платах LaunchPad, стыковочных станциях и платах управления ISO.
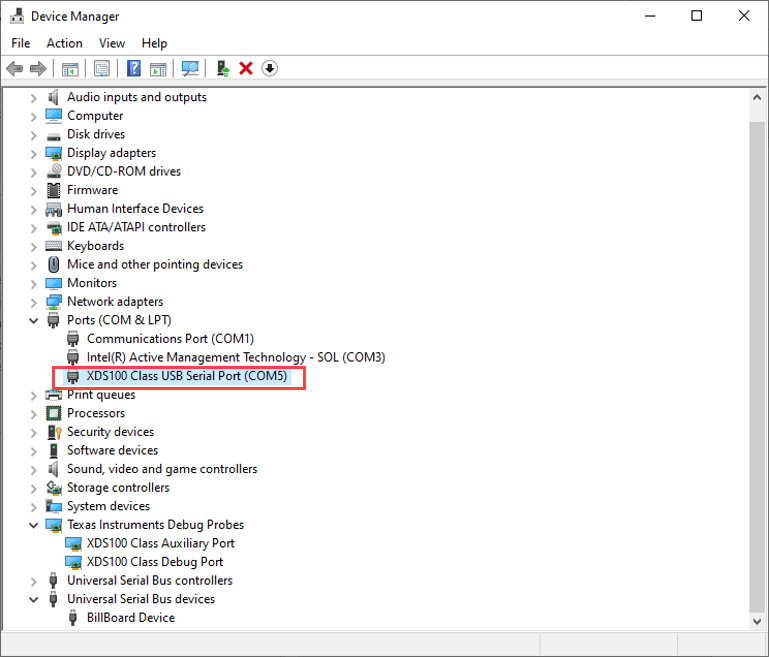
Выполните следующие действия, чтобы найти последовательный порт связи в диспетчере устройств Windows ® PC после подключения целевого оборудования к системе:
Откройте диспетчер устройств на компьютере с Windows.
Найдите запись в разделе Порты (COM&LPT) под названием Последовательный порт USB (COMX), где X - число. Этот номер можно указать для настройки блока настройки последовательного соединения в модели хоста.
Если при поиске COM-порта возникают трудности, выполните следующие действия для определения COM-порта:
Откройте диспетчер устройств на компьютере с Windows.
Найдите запись в разделе Порты (COM&LPT) под названием Последовательный порт USB (COMX), где X - число. При наличии нескольких COM-портов можно отсоединить и повторно подключить плату C2000 и наблюдать за обновлениями в диспетчере устройств для определения COM-порта.
Либо выполните следующие действия для определения правильного имени порта для подключенного оконечного оборудования:
Щелкните правой кнопкой мыши порт связи и выберите «Свойства».
На вкладке Подробно выберите свойство Идентификаторы оборудования.
Если порт указывает следующие идентификаторы, порт связи принадлежит аппаратной плате контроллера C2000™ подключенного TI:
VID: 0403
PID: A6D0
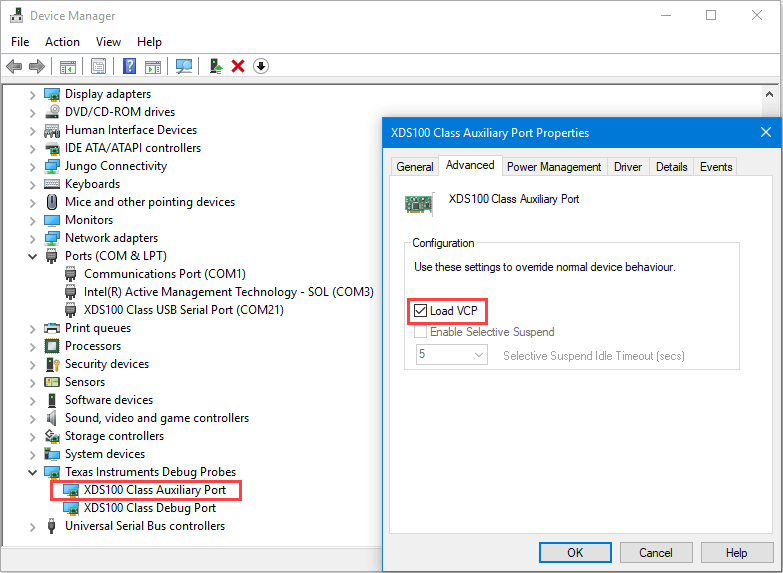
Если вы не видите или не находите нужный порт в портах (COM&LPT), перейдите к Texas Instruments Debug Probes и выполните следующие действия:
Щелкните правой кнопкой мыши по XDS100 Class Auxiliary Port Properties и выберите Свойства. Перейдите на вкладку Дополнительно и выберите Загрузить VCP.
Щелкните правой кнопкой мыши по XDS100 Class Debug Port Properties и выберите Свойства. Перейдите на вкладку «Дополнительно» и снимите флажок «Загрузить VCP».
Отсоедините и снова подключите кабель USB к системе и просмотрите обновления в диспетчере устройств, чтобы определить COM-порт. Теперь система отображает COM-порт, принадлежащий аппаратной плате контроллера C2000 подключенного TI.
Совет
VCP означает виртуальный COM-порт (для устройств, поддерживающих последовательную связь по USB).
Если Texas Instruments Debug Probes не отображаются в Диспетчере устройств, разверните Универсальные контроллеры последовательной шины в Диспетчере устройств и выполните следующие действия:
Щелкните правой кнопкой мыши TI XDS 100 Channel B и выберите Свойства. Перейдите на вкладку Дополнительно и выберите Загрузить VCP.
Щелкните правой кнопкой мыши TI XDS 100 Channel A и выберите Properties. Перейдите на вкладку «Дополнительно» и снимите флажок «Загрузить VCP».
Отсоедините и снова подключите кабель USB к системе и просмотрите обновления в диспетчере устройств, чтобы определить COM-порт. Теперь система отображает COM-порт, принадлежащий аппаратной плате контроллера C2000 подключенного TI.
Если диспетчер устройств не обнаруживает оконечное оборудование, выполните следующие действия:
Проверьте, что оконечное оборудование подключено к системе.
Проверьте правильность установки драйверов устройств. Как правило, драйверы устройств устанавливаются вместе с Code Composer Studio™ (CCS). Проверьте, установлено ли в системе программное обеспечение CCS. Также попробуйте переустановить драйверы устройств, предложенные Texas Instruments.
Проверьте, не поврежден ли кабель последовательного соединения.
Если проблема не устранена, попробуйте подключить оборудование к другой системе и проверьте, обнаруживает ли диспетчер устройств оборудование.
Если проблема не устранена, целевое оборудование может быть неисправным.
