Motor Control Blockset™ предоставляет блоки Simulink ® для создания и настройки полевого управления и других алгоритмов для бесщеточных двигателей. Блоки включают преобразования Парка и Кларка, бесконсенсорные наблюдатели, ослабление поля, генератор космических векторов и автотюнер ВОК. Алгоритмы управления при моделировании по замкнутому контуру можно проверить с помощью моделей двигателя и инвертора, включенных в блоксеть.
Инструмент для оценки параметров блоксети проводит предварительно определенные тесты на оборудовании двигателя для точной оценки сопротивления статора, индуктивности d-оси и q-оси, обратной ЭДС, инерции и трения. Эти значения параметров двигателя можно включить в моделирование с замкнутым контуром для анализа конструкции контроллера.
В ссылочных примерах показано, как проверить алгоритмы управления при моделировании рабочего стола и создать компактный код C, поддерживающий скорость выполнения, необходимую для реализации производства. Ссылочные примеры также могут быть использованы для реализации алгоритмов для аппаратных наборов управления двигателем, поддерживаемых блоком.
В этом примере для запуска двигателя используется управление с разомкнутым контуром (также известное как скалярное управление или управление В/Гц).
Оцените параметры двигателя с помощью функции оценки параметров в блоке управления двигателем.
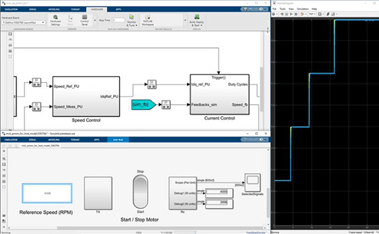
Выполните настройку параметров управления для подсистем управления скоростью и крутящим моментом.
Подключите двигатели, датчики и источник питания к аппаратным платам.
Настройте модель Simulink для взаимодействия с поддерживаемым целевым оборудованием.
Управление с разомкнутым и замкнутым контуром
Описывает управление с разомкнутым контуром, управление двигателем с замкнутым контуром и переход от управления с разомкнутым контуром к управлению с замкнутым контуром.
Реализуйте управление скоростью для PMSM и асинхронного двигателя с помощью полевого управления.
Реализуйте управление скоростью двигателя BLDC с помощью шестиступенчатой коммутации.
Связь между хостом и адресатом
Описывает модель хоста, целевую модель и их взаимодействие.
Смещение текущего датчика ADC и калибровка датчика положения
Описывает смещения для датчика Холла, квадратурного кодера и датчика тока ADC.
Определяет нормализованную систему единиц измерения с помощью базовых значений.