Перед моделированием или развертыванием модели на контроллере обновите параметры конфигурации создаваемой модели Simulink ® .
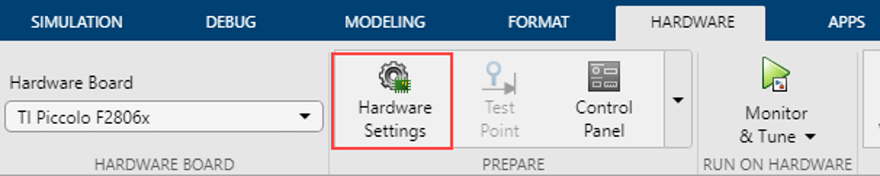
В окне Simulink щелкните Hardware Settings на вкладке HARDWARE, чтобы открыть диалоговое окно Configuration Parameters и выбрать целевое оборудование в поле Hardware board.
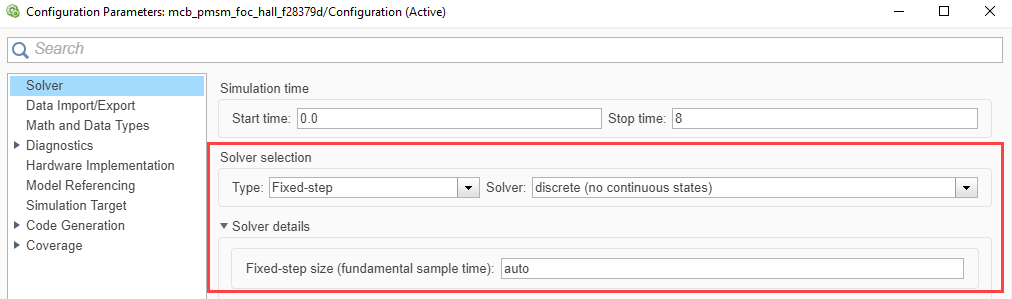
На вкладке Решатель (Solver) диалогового окна Параметры конфигурации (Configuration Parameters) для дискретного решателя с фиксированным шагом введите auto в поле Фиксированный размер шага (время основной выборки).
При подключении аналоговых входов (датчиков тока или напряжения) к аппаратной плате настройте соответствующие параметры АЦП в диалоговом окне «Параметры конфигурации», выполнив следующие действия:
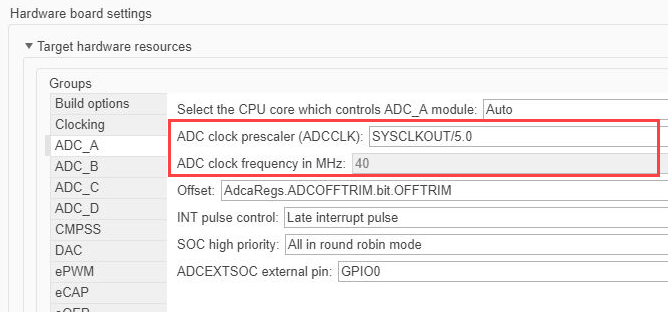
Откройте вкладку Hardware Implementation.
Установите prescaler синхросигнала АЦП и проверьте тактовую частоту АЦП. Убедитесь, что отображаемая тактовая частота АЦП меньше максимального значения, указанного в спецификации устройства.
В этом примере показана конфигурация ADC для LAUNCHXL-F28379D платы. Максимальная рабочая частота ADCCLK для TMS320F28379D целей - 50 МГц.
При подключении выходов PWM от оконечного устройства к инвертору настройте соответствующие параметры PWM в диалоговом окне Configuration Parameters, выполнив следующие шаги:
Откройте вкладку Hardware Implementation.
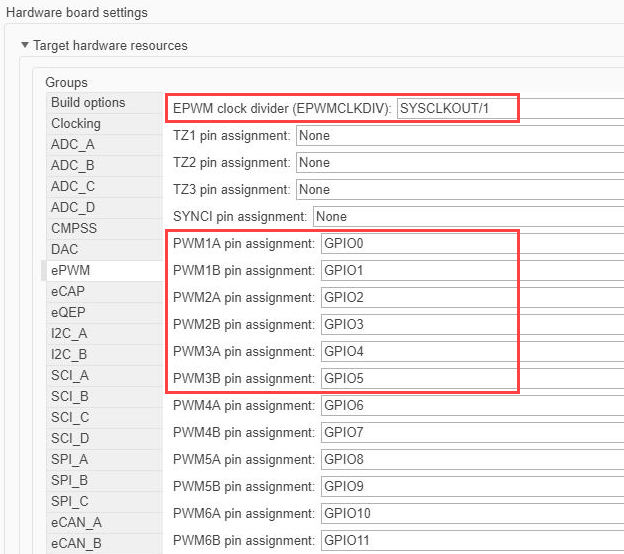
Установите делитель синхросигналов ePWM в значение SYSCLKOUT/1.
Обновите следующие поля назначения контактов PWM.
| Настройки контактов ePWM | Собственность |
|---|---|
PWM1A pin assignment | Импульс затвора для транзистора высокого уровня фазы A |
PWM1B pin assignment | Импульс затвора для транзистора низкой стороны фазы A |
PWM2A pin assignment | Импульс затвора для транзистора высокого уровня фазы B |
PWM2B pin assignment | Импульс затвора для транзистора низкой стороны фазы B |
PWM3A pin assignment | Импульс затвора для транзистора высокого уровня фазы-C |
PWM3B pin assignment | Импульс затвора для транзистора с низкой фазой-C |
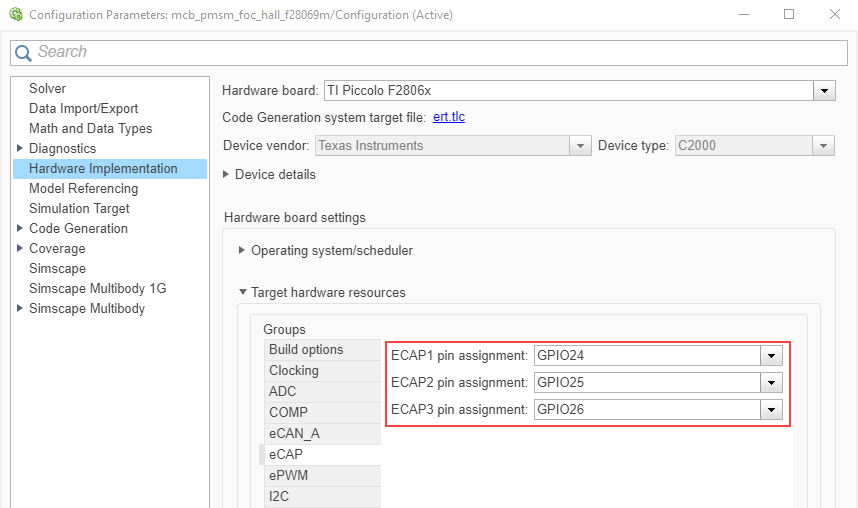
При подключении датчика Hall к аппаратной плате настройте соответствующие параметры в диалоговом окне Configuration Parameters, выполнив следующие действия:
Откройте вкладку Hardware Implementation.
Выберите группу eCAP в разделе Hardware board settings > Target hardware resources.
Обновите следующие поля назначения контактов ECAP:
| Поле назначения контактов ECAP | Значение поля |
|---|---|
| Зал А |
| Зал B |
| Зал С |
Следующий пример показывает eCAP конфигурацию для датчика Холла, связанного с правлением DRV8312 с Пикколо F28069 карта контроля MCU:
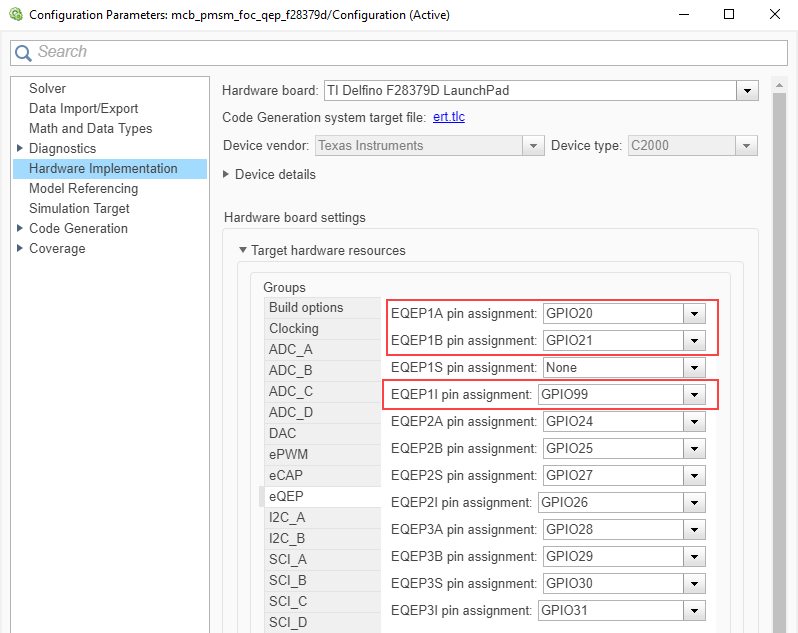
При подключении датчика квадратурного кодера к плате аппаратных средств настройте соответствующие параметры в диалоговом окне Configuration Parameters, выполнив следующие действия:
Откройте вкладку Hardware Implementation.
Выберите группу eQEP в разделе Hardware board settings > Target hardware resources.
Обновите следующие поля назначения выводов EQEP:
| Поле назначения контактов EQEP | Собственность |
|---|---|
| Квадратурный кодировочный канал A |
| Квадратурный канал кодирования B |
| Индекс квадратурного кодера |
В следующем примере показана конфигурация eQEP для квадратурного датчика кодирования, подключенного к плате LAUNCHXL-F28379D:
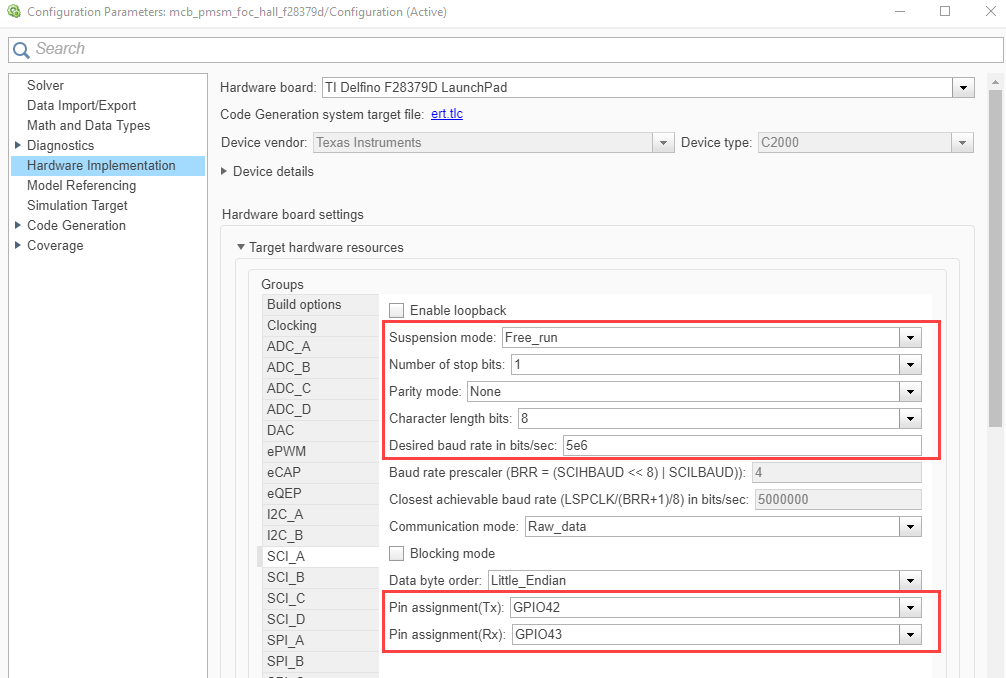
Если создается код и используется последовательная связь между главной и целевой моделями Simulink, настройте связанные параметры в диалоговом окне Параметры конфигурации (Configuration Parameters), выполнив следующие действия.
Откройте вкладку Hardware Implementation.
Выберите группу SCI_A в разделе Hardware board settings > Target hardware resources.
Обновите следующие параметры SCI_A:
| SCI_A настройки | Собственность |
|---|---|
Suspension mode | Режим последовательной подвески |
Number of stop bits | Стоп-биты |
Parity mode | Паритет |
Character length bits | Биты данных |
Desired baud rate in bits/sec | Скорость последовательной связи в бодах |
| Вывод для последовательной передачи |
| Входной вывод для последовательного приемника |
Например, используйте следующую конфигурацию SCI_A для датчика Холла, связанного с правлением F28379D LaunchPad: