В этом разделе описываются методы управления электродвигателями с разомкнутым и замкнутым контуром.
Управление с разомкнутым контуром (также известное как скалярное управление или управление В/Гц) - популярный метод управления двигателем, который можно использовать для запуска любого двигателя переменного тока. Это простая техника, которая не нуждается в какой-либо обратной связи от двигателя. Для поддержания постоянного магнитного потока статора мы сохраняем амплитуду напряжения питания пропорциональной его частоте.
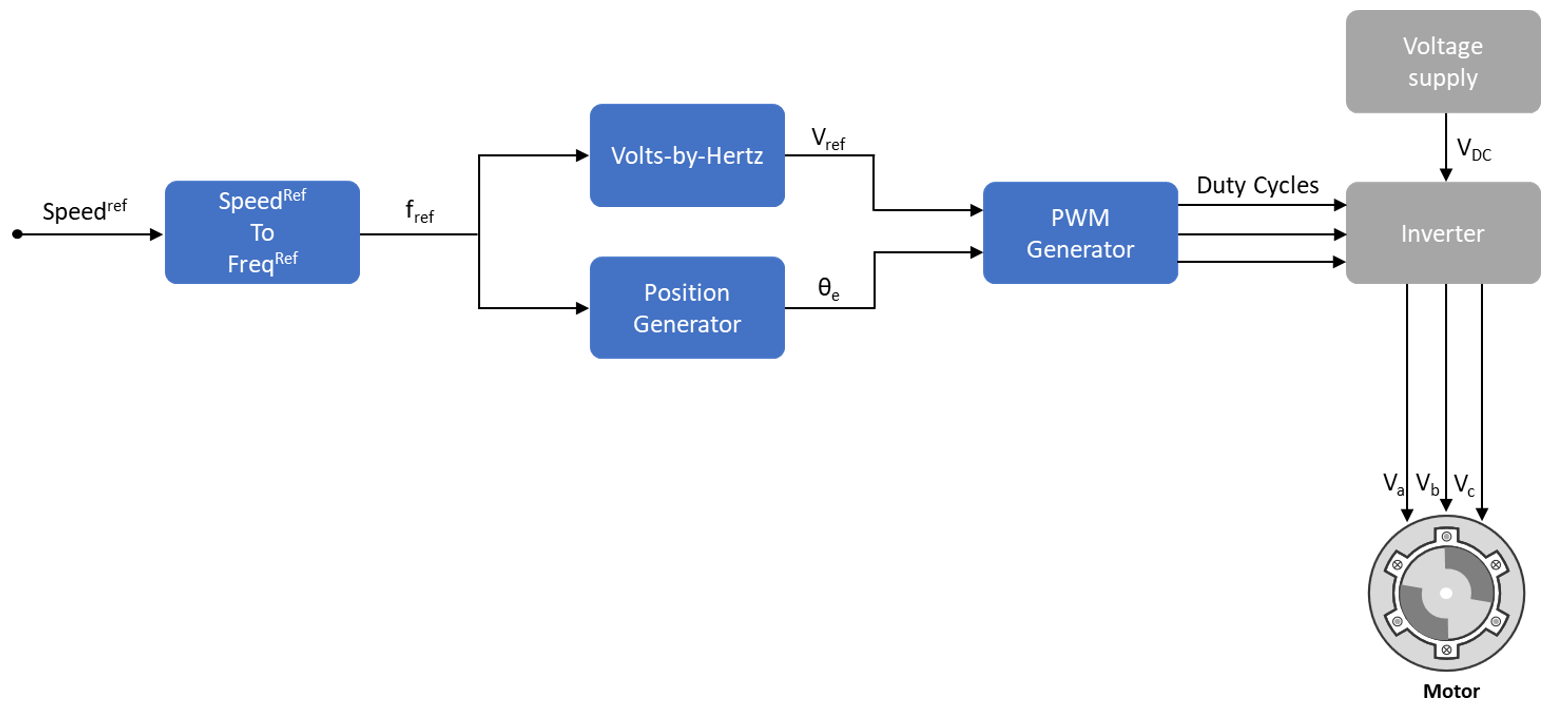
На этом рисунке показана система управления с разомкнутым контуром. Схема питания состоит из ШИМ-инвертора, питаемого от источника постоянного тока. Система не использует сигнал обратной связи для реализации управления. Для определения частоты напряжений статора используется опорная скорость. Система вычисляет величину напряжения как пропорциональную отношению номинального напряжения и номинальной частоты (обычно известное как отношение Вольт/Гц), так что поток остается постоянным.
где:
- номинальный поток двигателя в Wb.
- напряжение статора электродвигателя переменного тока в вольтах.
- частота напряжения статора электродвигателя переменного тока в Гц.
В системе с разомкнутым контуром скорость двигателя переменного тока выражается как:
fsp
где:
) - механическая частота вращения двигателя переменного тока в об/мин.
- частота напряжения статора и токов электродвигателя переменного тока в Гц.
- число пар полюсов двигателя.
Предыдущее выражение можно использовать для определения частоты опорных напряжений для требуемой скорости (для данной машины).
RPM ref60
Эта частота используется для генерации опорных напряжений ШИМ для инвертора. Вычислить величину напряжений, поддерживая отношение Вольт/Гц как:
fref
При использовании представления системы на единицу измерения система управления с разомкнутым контуром рассматривает Vrated в качестве базовой величины, которая обычно соответствует 1PU или 100% рабочему циклу. В зависимости от метода модуляции (синусоидальная ШИМ или пространственная векторная ШИМ) может потребоваться дополнительное усиление ( для синусоидальной ШИМ). При более низких скоростях система нуждается в минимальном повышающем напряжении (15% или 25% от номинального напряжения), чтобы преодолеть эффект падения напряжения сопротивления статора.
Управление с разомкнутым контуром можно использовать в приложениях, в которых динамический отклик не является проблемой и требуется экономичное решение. Управление двигателем с разомкнутым контуром не может учитывать внешние условия, которые могут повлиять на скорость двигателя. Поэтому система управления не может автоматически корректировать отклонение между желаемой и фактической скоростями двигателя.
Примечание
В реализации скалярного управления не учитывается компенсирующее падение напряжения из-за сопротивления статора и ослабления поля.
Управление по замкнутому контуру учитывает обратную связь системы для управления. Управление двигателем по замкнутому контуру учитывает обратную связь сигналов двигателя, таких как ток и положение. Система управления использует сигналы обратной связи для регулирования напряжения (приложенного к двигателю), чтобы поддерживать отклик двигателя на опорном значении.
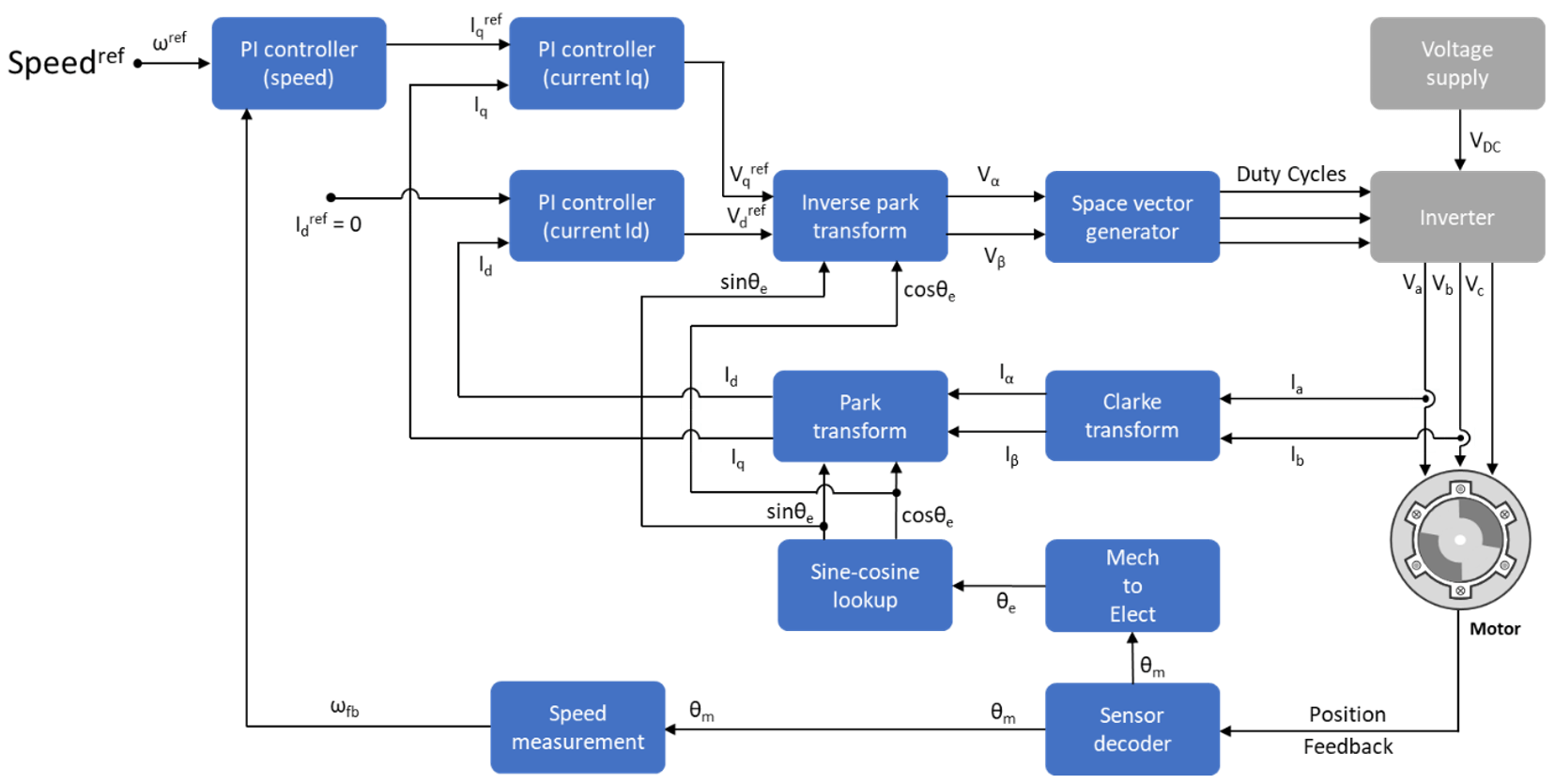
Полевое управление (или векторное управление) - популярная система с замкнутым контуром, которая используется в системах управления двигателями. Технология ВОК используется для осуществления регулирования крутящего момента, частоты вращения и положения двигателей по замкнутому контуру. Этот метод также обеспечивает хорошую возможность управления полным диапазоном крутящего момента и частоты вращения. Реализация ВОК требует преобразования токов статора из стационарной системы отсчета в систему отсчета потока ротора.
Управление скоростью и крутящим моментом являются обычно используемыми режимами управления в ВОК. Режим управления положением используется реже. В большинстве областей применения тяги используется режим регулирования крутящего момента, в котором система управления двигателем следует за эталонным значением крутящего момента. В режиме управления скоростью контроллер двигателя следит за эталонным значением скорости и генерирует эталонный крутящий момент для управления крутящим моментом, который формирует внутреннюю подсистему. Тогда как в режиме управления положением регулятор скорости образует внутреннюю подсистему.
Для реализации алгоритма ВОК необходима обратная связь в реальном времени по току и положению ротора. Для измерения тока и положения ротора можно использовать датчики. Можно также использовать безсенсорные методы, использующие оценочные значения обратной связи вместо фактических измерений на основе датчиков.
Управление по замкнутому контуру использует обратную связь по положению и току статора в реальном времени для настройки регулятора скорости и регулятора тока и изменения рабочих циклов инвертора. Это гарантирует, что скорректированное трехфазное напряжение (которое приводит в действие двигатель) корректирует отклонение обратной связи двигателя от желаемого значения.
В некоторых случаях требуется запуск двигателя с помощью системы управления с разомкнутым контуром. Как только двигатель достигает минимальной требуемой стабильности при управлении с разомкнутым контуром, система управления переходит в режим с замкнутым контуром.
В системе измерения положения на основе квадратурного кодера двигатель запускается в разомкнутом контуре и переходит в замкнутый контур, как только обнаружен импульс индекса.
При управлении положением без датчика двигатель начинает работать с 10% базовой скорости в разомкнутом контуре. После выхода опорного переключателя за пределы 10% базовой скорости система управления переходит из разомкнутого контура в замкнутый.
Для обеспечения плавного перехода от разомкнутого контура к замкнутому контуру контроллеры PI сбрасывают и запускают с того же начального состояния, что и выходы разомкнутого контура.
