Трехфазный асинхронный двигатель
Блок силового агрегата/движитель/электродвигатели и инверторы
Блок управления двигателем/Электрические системы/Двигатели
Блок асинхронного двигателя реализует трехфазный асинхронный двигатель. Блок использует трехфазные входные напряжения для регулирования индивидуальных фазных токов, что позволяет регулировать крутящий момент или частоту вращения двигателя.
По умолчанию блок устанавливает для параметра «Тип моделирования» значение Continuous для использования непрерывного времени выборки во время моделирования. Если требуется создать код для целей с двойной и одинарной точностью с фиксированным шагом, рекомендуется установить для параметра значение Discrete. Затем укажите параметр Sample Time, Ts.
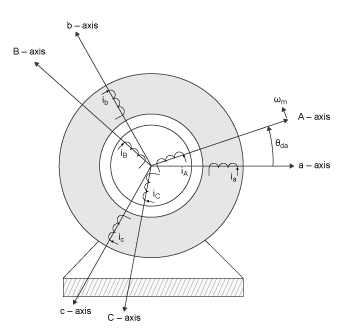
Блок реализует уравнения, которые выражены в неподвижном опорном (qd) кадре ротора. Ось d выравнивается по оси A. Все величины в системе отсчета ротора относятся к статору.
Блок использует эти уравнения для вычисления электрической скорости (startem) и скорости проскальзывания (startslip).
− groupem
Чтобы вычислить электрическую скорость ротора dq относительно оси А ротора (dA), блок использует разность между скоростью а оси (da) статора и скоростью скольжения:
groupem
Для упрощения уравнений для преобразований потока, напряжения и тока блок использует стационарный опорный кадр:
−
| Вычисление | Уравнение |
|---|---|
| Поток |
isdisqirdirq] |
| Ток |
λ sdλ sqλ rdλ rq] |
| Индуктивность |
Llr + Lm |
| Электромагнитный момент |
isdirq) |
Инвариантное преобразование мощности dq для обеспечения равенства мощности dq и трех фаз |
sin (Startda + 2ā3)] [vavbvc] sin (Startda + 2ā3)] [isdisq] |
Уравнения используют эти переменные.
ωm | Угловая скорость ротора (рад/с) |
ωem | Частота вращения электрического ротора (рад/с) |
ωslip | Частота проскальзывания электрического ротора (рад/с) |
ωsyn | Синхронная частота вращения ротора (рад/с) |
ωda | dq частота вращения статора относительно оси а ротора (рад/с) |
ωdA | dq частота вращения статора относительно оси А ротора (рад/с) |
Θda | dq электрический угол статора относительно оси а ротора (рад) |
ΘdA | dq электрический угол статора относительно оси А ротора (рад) |
Lq, Ld | q- и d-осевые индуктивности (H) |
Ls | Индуктивность статора (H) |
Lr | Индуктивность ротора (H) |
Lm | Индуктивность намагничивания (H) |
Lls | Индуктивность утечки статора (H) |
Llr | Индуктивность утечки ротора (H) |
vsq, vsd | Напряжения q- и d-оси статора (В) |
isq, isd | Токи q- и d-оси статора (А) |
λ кв, λ сд | Поток по оси q- и d статора (Wb) |
irq, ird | Токи q- и d-оси ротора (A) |
λ rq, λ rd | Поток по q- и d-оси ротора (Wb) |
| va, vb, vc | Фазы напряжения статора a, b, c (V) |
| ia, ib, ic | Фазы токов статора a, b, c (A) |
RS | Сопротивление обмоток статора (Ом) |
RR | Сопротивление обмоток ротора (Ом) |
P | Количество пар полюсов |
Те | Электромагнитный момент (Нм) |
Угловая скорость двигателя определяется:
) d
Уравнения используют эти переменные.
J | Комбинированная инерция двигателя и нагрузки (кгм ^ 2) |
F | Комбинированное вязкое трение двигателя и нагрузки (Н· м/( рад/с)) |
θm | Механическое угловое положение двигателя (рад) |
TM | Крутящий момент на валу двигателя (Нм) |
Те | Электромагнитный момент (Нм) |
Tf | Крутящий момент статического трения вала двигателя (Нм) |
ωm | Угловая механическая скорость двигателя (рад/с) |
Для учета мощности блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая мощность | Pmot | startmTe |
PwrBus | Электроэнергия | Pbus | vcnic | ||
|
| PwrElecLoss | Потеря резистивной мощности | Pelec | + Rrirq2) | |
PwrMechLoss | Потеря механической мощности | Pmech | Если для параметра Port Configuration установлено значение startm 'Tf) Если для параметра Port Configuration установлено значение 0 | ||
|
| PwrMtrStored | Накопленная мощность двигателя | Pstr | Pmech | |
Уравнения используют эти переменные.
RS | Сопротивление статора (Ом) |
RR | Сопротивление двигателя (Ом) |
ia, ib, ic | Ток фазы a, b и c статора (A) |
isq, isd | Токи q- и d-оси статора (А) |
фургон, vbn, vcn | Напряжение фазы a, b и c статора (В) |
ωm | Угловая механическая скорость ротора (рад/с) |
F | Комбинированное вязкое демпфирование двигателя и нагрузки (Н· м/( рад/с)) |
Те | Электромагнитный момент (Нм) |
Tf | Комбинированный момент трения двигателя и нагрузки (Нм) |
[1] Мохан, Нэд. Расширенные электрические приводы: анализ, управление и моделирование с использованием Simulink. Миннеаполис, МН: МНПЕРЕ, 2001.
