Blockset™ управления двигателем обеспечивает инструмент оценки параметров, который точно оценивает параметры двигателя. Расчетные параметры двигателя используются для моделирования модели двигателя и проектирования системы управления. Поэтому реакция моделирования с оценочными параметрами для модели двигателя близка к поведению тестируемого двигателя.
Инструмент оценки параметров определяет эти параметры двигателя для синхронного двигателя с постоянным магнитом:
| Параметры двигателя | Единицы |
|---|---|
Фазовое сопротивление (Rs) | Ом |
индуктивности по осям d и q (Ld и Lq) | Генри |
Константа обратной ЭДС (Ke) | Vpk_LL/krpm (где Vpk_LL - пиковое напряжение межлинейного измерения) |
Инерция двигателя (J) | Kg.m^2 |
Постоянная трения (F) | N.m.s |
Инструмент оценки параметров принимает минимально необходимые входные данные, выполняет тесты на целевом оборудовании и отображает оцененные параметры.
Инструменту оценки параметров требуется положение двигателя, определяемое либо квадратурным кодером, либо датчиком Холла, либо наблюдателем потока без датчика. Для правильного определения положения двигателя с помощью датчика положения необходимо откалибровать квадратурный кодировщик или датчик Холла, прикрепленный к тестируемому двигателю.
Убедитесь, что PMSM находится в состоянии отсутствия нагрузки.
При использовании датчиков Холла:
Убедитесь, что в PMSM установлены датчики Холла.
Откалибруйте смещение датчика Холла. Инструкции см. в разделе Калибровка смещения Холла для двигателя PMSM.
При использовании квадратурного датчика кодирования:
Убедитесь, что PMSM имеет квадратурный датчик кодирования.
Откалибруйте смещение квадратурного кодера. Инструкции см. в разделе Калибровка смещения квадратурного кодера для двигателя PMSM.
Примечание
Если в поле Выбор датчика (Sensor Selection) в главной модели установлено значение Sensorless, можно пропустить этап калибровки датчика положения.
В этом примере поддерживаются только следующие конфигурации оборудования:
Конфигурация контрольной карты Texas Instruments™ F28069M:
F28069M контрольная карта
DRV8312-69M-KIT инвертор
PMSM с датчиком Hall или квадратурным кодером
Источник питания постоянного тока
Примечание
Плата DRV8312-69M-KIT имеет известную проблему в секции питания платы. Из-за этого ограничения плата поддерживает не все типы датчиков Холла. Например, он не поддерживает датчик Холла двигателя Teknic M-2310P.
Конфигурация LAUNCHXL-F28379D Texas Instruments:
Контроллер LAUNCHXL-F28379D
BOOSTXL-DRV8305 инвертор
PMSM с датчиком Hall или квадратурным кодером
Источник питания постоянного тока
Для выполнения оценки параметров необходимы следующие продукты:
Блок управления двигателем
Toolbox™ с фиксированной точкой
Только для создания целевых моделей необходимы следующие дополнительные продукты:
Встроенный кодер ®
Пакет поддержки встроенного кодера для техасских приборов C2000™ процессоров
Для конфигурации платы управления F28069M:
Подключите плату управления F28069M к J1 платы инвертора DRV8312-69M-KIT.
Подключите двигатель к трем фазам MOA, MOB и MOC на плате инвертора.
Подключите источник питания постоянного тока к PVDDIN на плате инвертора.
При использовании датчика Холла подключите выход кодера датчика Холла к J10 на плате инвертора.
При использовании квадратурного датчика кодировки подключите квадратурные контакты кодировщика (G, I, A, 5V, B) к J4 на плате инвертора.
Для конфигурации LAUNCHXL-F28379D:
Присоедините плату инвертора к плате контроллера так, чтобы J1, J2 BOOSTXL совпадал с J1, J2 LAUNCHXL.
Подключите двигатель тремя фазами к MOTA, MOTB и MOTC на плате инвертора BOOSTXL.
Подключите источник питания постоянного тока к PVDD и GND на плате инвертора BOOSTXL.
При использовании датчика Холла подключите выход датчика Холла к QEP_B (сконфигурированному как eCAP) на LAUNCHXL.
При использовании квадратурного датчика кодировки подключите квадратурные контакты кодировщика (G, I, A, 5V, B) к QEP_A на плате контроллера LAUNCHXL.
Дополнительные сведения об этих соединениях см. в разделе Аппаратные подключения.
Дополнительные сведения о параметрах модели см. в разделе Параметры конфигурации модели.
Для LAUNCHXL-F28379D загрузите типовую программу к CPU2, например, программу, которая управляет синим светодиодом CPU2, используя GPIO31 (c28379D_cpu2_blink.slx), чтобы убедиться, что CPU2 не настроен на использование периферийных устройств платы, предназначенных для CPU1.
Инструмент оценки параметров включает в себя целевую модель и главную модель. Модели взаимодействуют друг с другом с помощью последовательного интерфейса связи. Дополнительные сведения см. в разделе Связь между хостом и адресатом.
Введите сведения о тестируемом двигателе в главной модели. Целевая модель использует алгоритм для выполнения тестов двигателя и оценки параметров двигателя. Главная модель запускает эти тесты и отображает оцененные параметры.
Чтобы открыть модель хоста оценки параметров, введите следующую команду:
open_system('mcb_param_est_host_read.slx');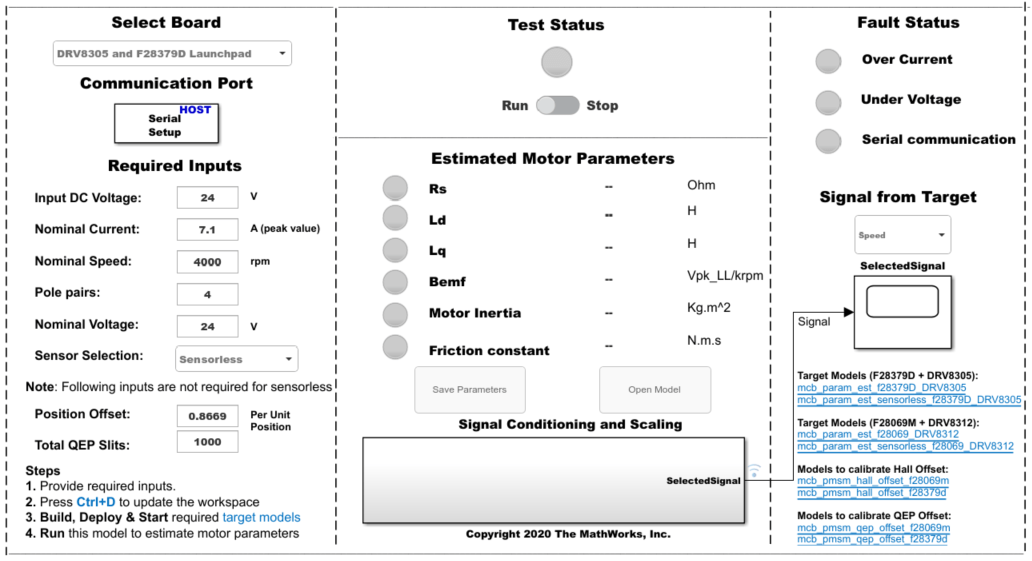
Введите следующие сведения в главную модель для подготовки рабочей области:
Select Board (Выбор платы) - выбор комбинации целевого аппаратного обеспечения и инвертора.
Порт связи - укажите последовательный порт, который требуется настроить. Выберите доступный порт из списка. Дополнительные сведения см. в разделе Поиск порта связи.
Требуемые входные данные (Required Inputs) - введите данные спецификации двигателя. Эти значения можно получить либо из спецификации двигателя, либо с таблички.
Входное напряжение постоянного тока - напряжение питания постоянного тока для инвертора (вольт).
Номинальный ток - номинальный ток двигателя (Ampere).
Номинальная частота вращения - номинальная частота вращения двигателя (об/мин).
Пары полюсов - количество пар полюсов двигателя.
Номинальное напряжение - номинальное напряжение двигателя (вольт).
Смещение положения - значение смещения датчика положения (Hall или квадратурный кодер) (на единицу положения) (см. Калибровка смещения Холла для двигателя PMSM, Калибровка смещения квадратурного кодера для двигателя PMSM и Система на единицу).
Выбор датчика - тип используемого датчика положения. Можно выбрать одно из следующих значений:
QEP - Выберите эту опцию, если используется датчик квадратурного датчика, подключенный к двигателю.
HALL - Выберите эту опцию, если вы используете датчики Холла, доступные в вашем двигателе.
Sensorless - Выберите эту опцию, если вы хотите использовать блок оценки положения без датчика Flux Observer вместо датчика положения. Дополнительные сведения об этом блоке см. в разделе Flux Observer.
Всего щелей QEP - количество щелей, доступных в квадратурном датчике. По умолчанию это поле имеет значение 1000.
Примечание
При обновлении обязательных входных данных необходимо учитывать следующие ограничения:
Номинальная частота вращения двигателя должна быть менее 25000 об/мин.
Тесты защищают оборудование от перегрузки по току. Однако для того, чтобы эти неисправности не возникали, поддерживайте номинальный ток двигателя (введенный в поле Nominal Current) меньше максимального тока, поддерживаемого инвертором.
При наличии блока питания постоянного тока на базе SMPS установите безопасный предел тока для источника питания в целях безопасности.
Перед запуском тестов с помощью инструмента оценки параметров необходимо загрузить двоичные файлы (.hex/ .out) генерируется целевой моделью в целевое аппаратное обеспечение. Существует два рабочих процесса загрузки двоичных файлов:
Рабочий процесс 1: Построение и развертывание целевой модели:
Этот рабочий процесс используется для создания и развертывания кода для целевой модели. Убедитесь, что вы нажимаете клавиши Ctrl + D, чтобы обновить рабочее пространство с требуемыми данными ввода из главной модели.
Щелкните одну из этих гиперссылок в модели узла оценки параметров, чтобы открыть целевую модель (для используемого оборудования):
Для контроллера F28069M-based подключенного к датчику Hall или квадратурному кодировщику:
mcb_param_est_f28069_DRV8312
Для контроллера F28069M-based использующего безсенсорный блок Flux Observer:
mcb_param_est_sensorless_f28069_DRV8312
Для контроллера F28379D-based подключенного к датчику Hall или квадратурному кодировщику:
mcb_param_est_f28379D_DRV8305
Для контроллера F28379D-based использующего безсенсорный блок Flux Observer:
mcb_param_est_sensorless_f28379D_DRV8305
Щелкните Создать, Развернуть и начать на вкладке Оборудование, чтобы развернуть целевую модель на оборудовании.
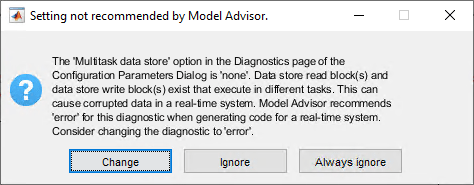
Примечание
Игнорировать предупреждающее сообщение Multitask data store option in the Diagnostics page of the Configuration Parameter Dialog is none отображается консультантом по модели путем нажатия кнопки Всегда игнорировать (Always Ignore). Это часть предполагаемого рабочего процесса.
Рабочий процесс 2: Загрузка целевой модели вручную:
Используйте этот рабочий процесс для развертывания двоичных файлов (.hex/ .out) целевой модели вручную с помощью стороннего инструмента (поток операций не требует создания кода). Этот рабочий процесс действителен только для двигателя Teknic M-2310P.
Найдите двоичные файлы (.hex/ .out) в этих местах:
<matlabroot>\toolbox\mcb\mcbexamples\mcb_param_est_f28069_DRV8312.out
<matlabroot>\toolbox\mcb\mcbexamples\mcb_param_est_f28379D_DRV8305.out
Откройте стороннее средство для развертывания двоичных файлов (.hex/ .out).
Загрузите и запустите двоичные файлы (.hex/ .out) на оконечном оборудовании.
Выполните следующие действия для запуска инструмента оценки параметров блока управления двигателем.
Убедитесь, что развернуты двоичные файлы (.hex/ .out), генерируемой из целевой модели, на целевое аппаратное обеспечение и обновляют необходимые сведения в главной модели.
В главной модели щелкните Выполнить (Run) на вкладке Моделирование (Simulation), чтобы выполнить тесты оценки параметров.
Процесс оценки параметров занимает менее минуты для выполнения тестов. Во время тестов можно игнорировать звуковой сигнал.
Модель-основа отображает оцененные параметры двигателя после успешного завершения испытаний.
Инструмент использует следующий алгоритм для оценки параметров:
Сопротивление двигателя (R) - инструмент использует закон Ома для оценки этого значения.
Индуктивность двигателя (Ld и Lq) - инструмент использует метод частотного впрыска для оценки этих значений.
Обратная ЭДС (Ke) - инструмент измеряет токи и напряжения и использует уравнение электродвигателя для оценки этого значения.
Поток постоянного магнита (λ) - для оценки этого значения инструмент использует оцененную обратную постоянную ЭДС.
Постоянная трения (B) - инструмент оценивает это значение, используя уравнение крутящего момента для двигателя, работающего с постоянной скоростью.
Инерция (J) - инструмент оценивает это значение с помощью теста замедления.
Номинальный крутящий момент - инструмент оценивает это значение, используя расчетное значение постоянного магнитного потока двигателя.
По завершении тестов оценки параметров индикатор состояния теста становится зеленым.
Если тесты прерываются, светодиодный индикатор состояния теста становится красным. Когда светодиодный индикатор станет красным, снова запустите модель хоста для повторного запуска тестов оценки параметров.
Во время аварийной ситуации можно вручную перевести ползунок Run-Stop в положение Stop, чтобы остановить тесты оценки параметров. Кроме того, модель прерывает тесты оценки параметров и выключает эти светодиоды для защиты аппаратных средств от следующих отказов:
Неисправность по току (эта неисправность возникает, когда фактический ток, потребляемый от источника питания, превышает значение номинального тока, указанное в разделе «Требуемые входы» модели хоста)
Неисправность при пониженном напряжении (эта неисправность возникает, когда входное напряжение постоянного тока падает ниже 80% от значения входного напряжения постоянного тока, упомянутого в разделе «Требуемые входы» модели хоста)
Отказ последовательной связи
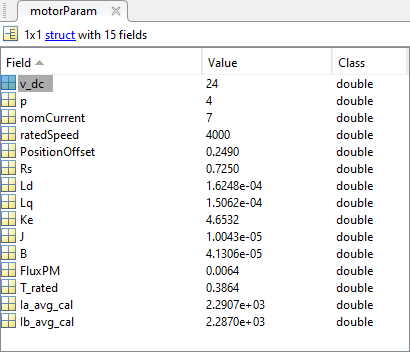
Можно экспортировать расчетные параметры двигателя и далее использовать их для проектирования системы моделирования и управления.
Для экспорта щелкните Сохранить параметры (Save Parameters), чтобы сохранить расчетные параметры в MAT (.mat) файл.
Для просмотра сохраненных параметров загрузите MAT (.mat) в рабочей области MATLAB ®. MATLAB сохраняет параметры в структуре с именемmotorParam в рабочей области.
Щелкните Открыть модель (Open Model), чтобы создать новую модель Simulink ® с блоком двигателя PMSM. Блок двигателя использует motorParam структурные переменные из рабочей области MATLAB.
