В этом разделе объясняется, как оценить точность модели установки (двигателя и инвертора) физического двигателя и нагрузки, подключенной к двигателю. Перед использованием модели завода для внедрения расширенных алгоритмов необходимо проверить модель завода и убедиться, что результаты близки к измерениям физической системы. Вы можете проверить систему, сравнивая ступенчатую реакцию управления скоростью и управления током в моделировании и в целевом оборудовании, подключенном к двигателю.
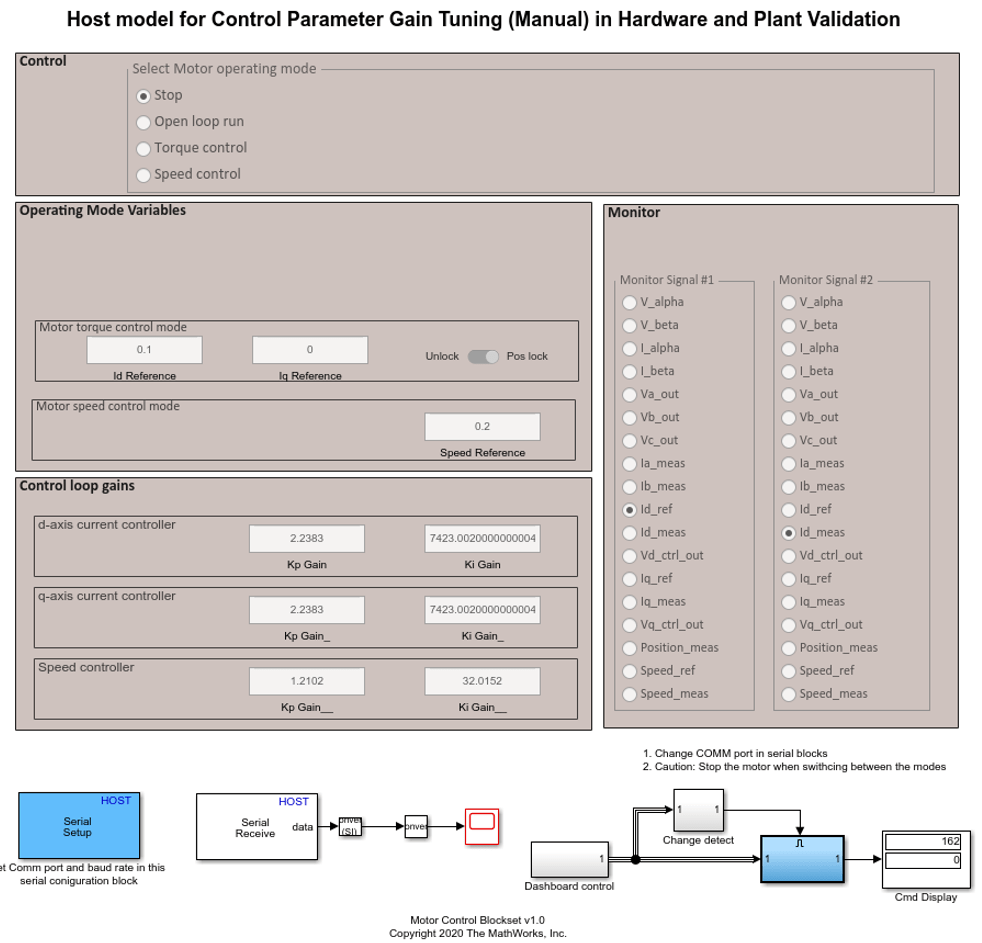
Используйте пример Tune Control Parameter Gains in Hardware and Validate Plant для измерения ступенчатой реакции контроллеров тока и скорости. Модель хоста в этом примере передает текущую ссылку на целевое аппаратное обеспечение и измеряет отклик на шаг текущего контроллера.
Для проверки системы можно использовать любой пример управления скоростью из Blockset™ управления двигателем.
Проверка контроля скорости путем сравнения ответа на шаг при моделировании и значений тестирования аппаратных средств.
Проверка контроля тока по оси d путем электрической или механической блокировки ротора и сравнения реакции на шаг при моделировании и результатов испытаний оборудования.
Для проверки текущего элемента управления d-axis можно использовать другой метод. Запустите двигатель с постоянной скоростью и обеспечьте шаговое изменение опорного тока d-оси. Это требует двух модификаций в подсистеме управления скоростью целевой модели. Установка опорного входного значения постоянной скорости. Ссылка на идентификатор команды из главной модели. Сравните ступенчатую реакцию тока d-оси при моделировании и в тестах оборудования.
Проверка контроля тока по оси Q путем механического соединения двигателя с внешним динамометром, работающим в режиме контроля скорости. Это требует двух модификаций в подсистеме управления скоростью целевой модели. Отбросьте ссылку Id и Iq с выхода контроллера PI скорости. Ссылка на идентификатор команды из главной модели. Сравните ступенчатую реакцию тока по оси q в моделировании и в тестах оборудования.
Предупреждение
При захвате отклика шага в элементе управления током d-оси всегда используйте положительный шаг. Отрицательные значения Id могут повредить постоянный магнит в PMSM.
Для развертывания модели на аппаратном обеспечении см. пример «Настройка усиления параметров управления на оборудовании и проверка установки». Оценка параметров двигателя, поскольку точность в модели установки важна для соответствия результатов моделирования аппаратным измерениям.
Перед сравнением ответов контроллера в моделировании и в целевом оборудовании крутящий момент нагрузки в моделировании установки должен соответствовать нагрузке двигателя в физической системе. Выполните следующие действия, чтобы рассчитать крутящий момент нагрузки в физической системе и обновить рассчитанный крутящий момент нагрузки в модели установки.
Запустите модель хоста и подключите целевое оборудование через последовательную связь.
В режиме работы «Выбор двигателя» выберите «Управление скоростью».
Двигатель вращается в управлении скоростью.
Выберите Id_meas в поле Monitor Signal # 1 и Iq_meas в поле Monitor signal # 2. Прочитайте Id_meas и Iq_meas значения из области.
Преобразование тока на единицу (PU) в ампер путем умножения на PU_System.I_base.
Рассчитайте крутящий момент нагрузки в Нм, используя следующее уравнение:
− Lq) Id⋅Iq]
где,
= Связь постоянного магнитного потока (pmsm.Flux_PM)
= Индуктивность в Генрихе (pmsm.Ld, pmsm. Lq)
= Ток, измеренный в амперах
Id_meas, измеренный ток Id (в PU), равен 0.
В mcb_pmsm_operating_mode_f28379d/Motor and Inverter/Plant Model (sim) подсистема обеспечивает вычисленное значение крутящего момента нагрузки в качестве входного сигнала для порта LdTrq блока двигателя PMSM.
При моделировании введите шаг скорости и запишите отклик скорости. На целевом оборудовании выполните команду на входе эталонного шага скорости и проверьте обратную связь скорости. Сравните результирующую реакцию шага в моделировании и в целевом оборудовании для определения точности модели установки.
Моделирование модели mcb_pmsm_operating_mode_f28379d. Постройте график опорной скорости и измеренных сигналов скорости. По умолчанию этот пример обеспечивает ввод шага 0.2 кому 0.5 к расчетной модели.
Запустите модель хоста для взаимодействия с целевым оборудованием.
В режиме «Выбор двигателя» измените режим с «Стоп» на «Скорость».
В модели хоста выберите Speed_ref в поле Monitor Signal # 1 и Speed_meas в поле Monitor Signal # 2.
Откройте область в главной модели.
В интерфейсе модели хоста измените speed_ref от 0.2 кому 0.5 и наблюдать за шаговым изменением объема работ.
Сравните пошаговый отклик результатов аппаратного обеспечения с результатами моделирования.
Сравните отклик шага, полученный при моделировании, с измерениями, полученными от целевого аппаратного обеспечения. Результаты могут варьироваться в зависимости от допусков в модели установки. Как правило, результаты моделирования близки к значениям, измеренным на целевом оборудовании.
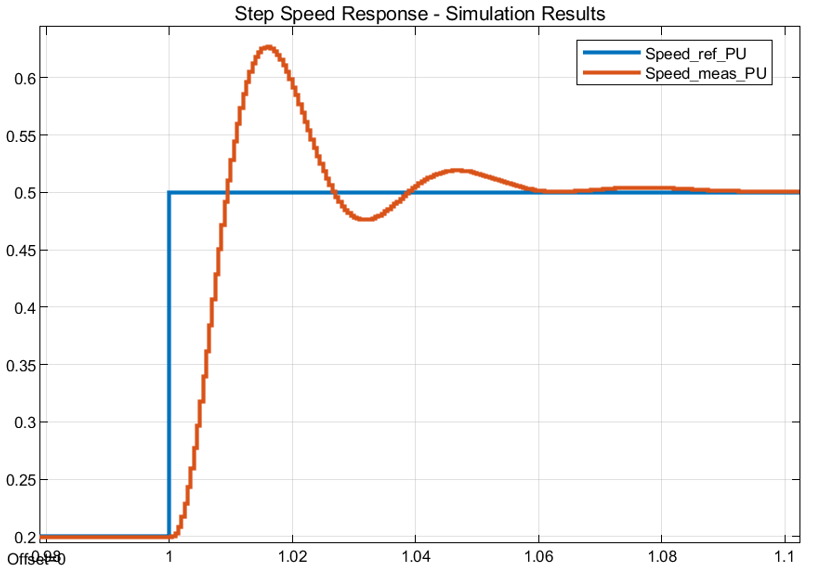
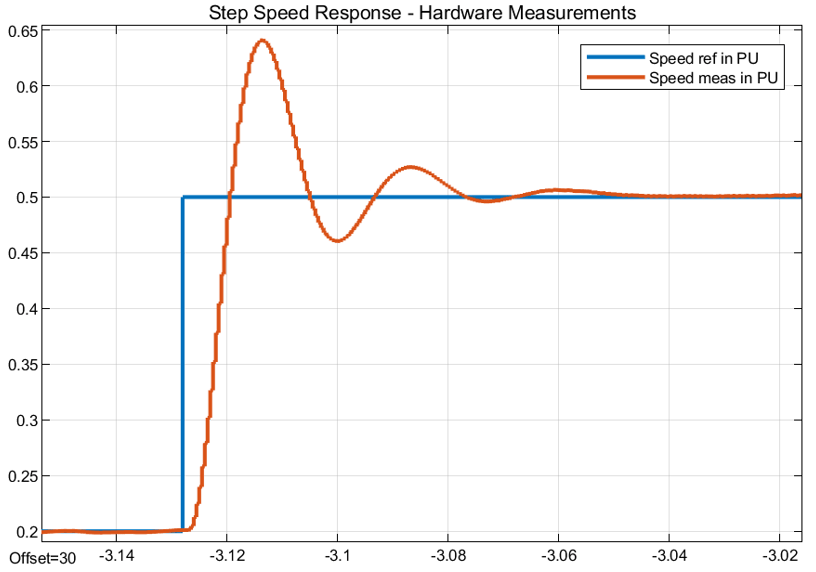
| Пиковое превышение (%) | Пиковое время (мс) | Время подъема (мс) | Время отстоя (мс) | |
|---|---|---|---|---|
| Результаты моделирования | 20.13% | 16.023 | 5.561 | 61.027 |
| Результаты аппаратного обеспечения | 22 % | 14.324 | 5.041 | 51.148 |
При моделировании укажите текущую ссылку шага и запишите текущую реакцию. В этом примере необходимо внести некоторые изменения для моделирования текущего ввода шага привязки. См. следующие шаги для изменения модели. Это относится только к моделированию. В целевом аппаратном обеспечении выполните команду ввода текущего опорного шага и проверьте текущую обратную связь. Сравните результирующий отклик шага в моделировании и в целевом оборудовании для определения точности модели установки.
Для аппаратных измерений запустите модель хоста.
В режиме «Выбор двигателя» измените режим с «Стоп» на «Крутящий момент».
Выберите Id_ref в поле Monitor Signal # 1 и Id_meas в поле Monitor Signal # 2 в модели хоста.
Откройте область в главной модели.
Изменение Id_ref от 0.02 кому 0.22 и наблюдать за шаговым изменением объема работ. Убедитесь, что двигатель не работает. В области отображается ответ на шаг для Id_ref вход.
Для моделирования необходимы два изменения в модели моделирования. В mcb_pmsm_operating_mode_f28379d/TorqueControl/Control Modes/torque_control подсистема добавляет пошаговый ввод для контроллера тока d-оси. Выберите ввод шага 0.02 кому 0.22 в 1 второй. Выберите выборку времени как -1. В блоке преобразования типа данных выберите выходной тип данных как fixdt(1,32,17).
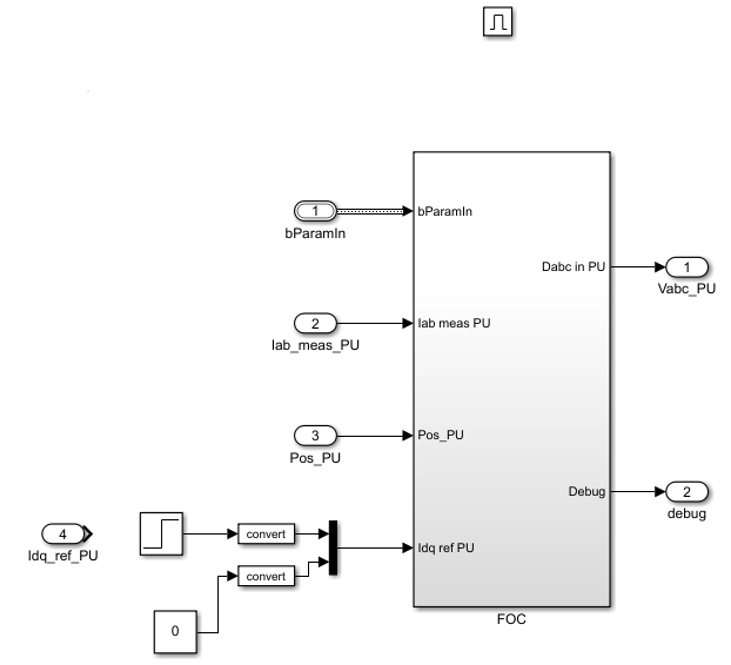
В блоке двигателя PMSM, доступном в mcb_pmsm_operating_mode_f28379d/Motor and Inverter/Plant Model (sim) , измените конфигурацию механического ввода на скорость и ввод 0 к входному порту Spd.
Запустите моделирование и измерьте Idref_PU и Idmeas_PU значения в Инспекторе данных моделирования.
Сравните отклик на шаг в оборудовании с результатами моделирования.
Сравните изображение области моделирования с измерениями целевого оборудования. Результаты могут варьироваться в зависимости от допусков в модели установки. При использовании точной модели установки результаты моделирования ближе к результатам измерений целевого оборудования.
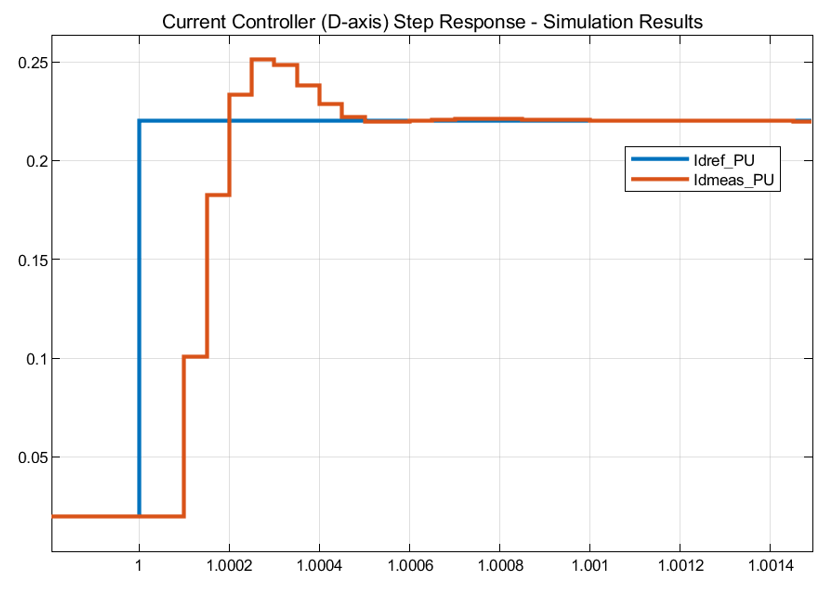
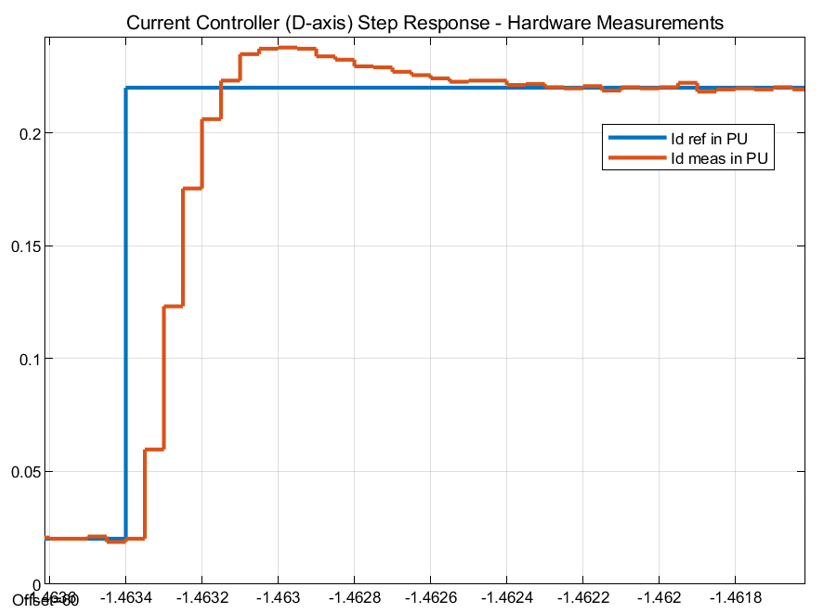
| Пиковое превышение (%) | Пиковое время (мкс) | Время нарастания (мкс) | Время установления (мкс) | |
|---|---|---|---|---|
| Результаты моделирования | 14 % | 300 | 150 | 500 |
| Результаты аппаратного обеспечения | 8.18 % | 400 | 150 | 800 |
Точность модели установки повышает точность моделирования и соответствует результатам тестирования аппаратных средств.
Совет
Если результаты моделирования значительно отличаются от результатов аппаратных измерений, проверьте коэффициент задержки и коэффициент масштабирования в модели установки.
Примечание
Для регулятора тока по оси q совместите двигатель с осью d и механически заблокируйте ротор. Следите за этим для контроллера тока d-оси для сравнительного анализа. Внешнюю механическую блокировку можно получить через механическую тормозную систему или с помощью муфты с динамометрическим двигателем, работающим в режиме регулирования скорости.
