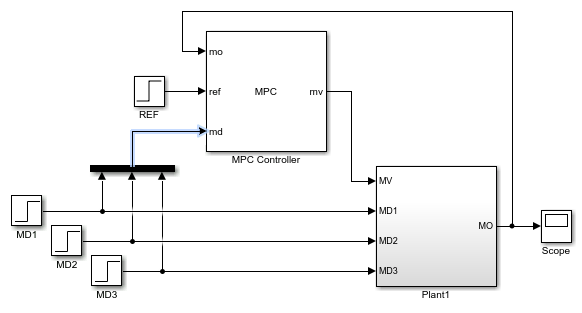
В этом разделе показано, как линеаризовать модели Simulink ® с помощью MPC Designer. Для этого откройте приложение из модели Simulink, содержащей блок контроллера MPC. Для этого примера используйте CSTR_ClosedLoop модель.
sys = 'CSTR_ClosedLoop';
open_system(sys)В окне модели дважды щелкните на блоке Контроллер MPC.
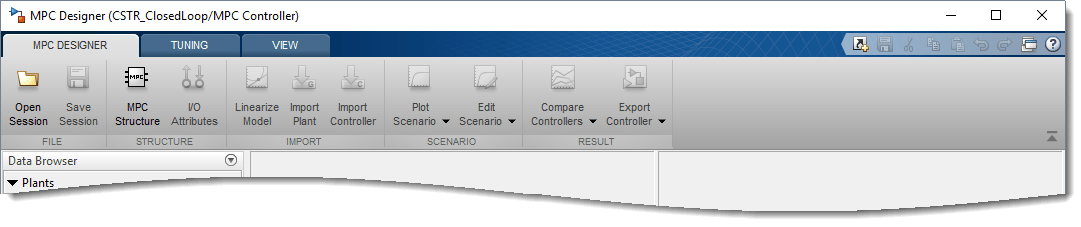
В диалоговом окне «Параметры блока» убедитесь, что поле «Контроллер MPC» пустое, и нажмите кнопку «Дизайн», чтобы открыть MPC Designer.
С помощью MPC Designer можно определить структуру MPC путем линеаризации модели Simulink. После определения начальной структуры MPC можно также линеаризовать модель в различных рабочих точках и импортировать линеаризованные заводы.
Примечание
Если контроллер из рабочей области MATLAB ® указан в поле Контроллер MPC, приложение импортирует указанный контроллер. В этом случае структура MPC извлекается из импортированного контроллера. В этом случае можно по-прежнему линеаризовать модель Simulink и импортировать линеаризованные растения.
В этом примере показано, как определить структуру ввода/вывода завода в MPC Designer путем линеаризации модели Simulink.
На вкладке Конструктор MPC в разделе Структура щелкните Структура MPC.
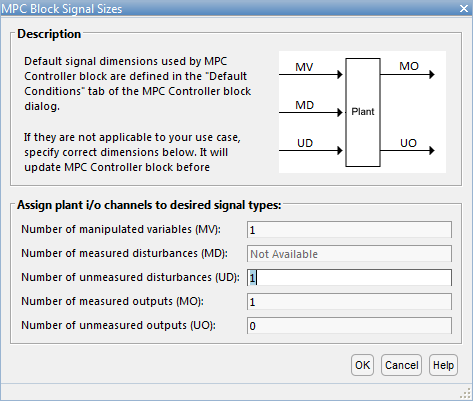
Задание размеров сигнала
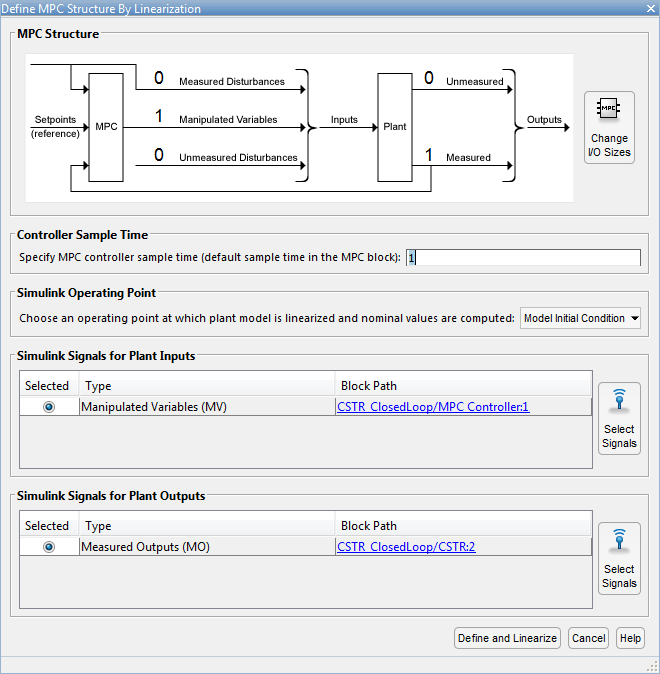
В диалоговом окне «Определение структуры MPC по линеаризации» в разделе «Структура MPC», если отображаемые размеры сигнала не соответствуют модели, нажмите кнопку «Изменить размеры ввода-вывода» для настройки размеров. Любые неизмеренные нарушения или неизмеренные выходы в модели не обнаруживаются блоком контроллера MPC. Укажите размеры для этих сигналов.
Совет
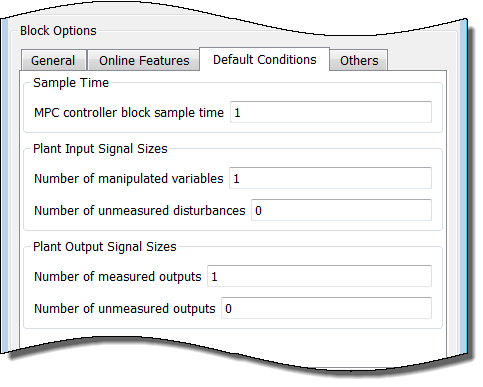
В диалоговом окне Параметры блока контроллера MPC (MPC Controller Block Parameters) на вкладке Условия по умолчанию (Default Conditions) можно определить время выборки контроллера и размеры сигнала перед открытием MPC Designer.
Выбор входных/выходных сигналов установки
Перед линеаризацией модели назначьте сигнальные линии Simulink каждому типу сигнала MPC в модели. Приложение использует эти сигналы в качестве входов и выходов линеаризации.
В разделах «Simulink Signals for Plant Inputs» и «Simulink Signals for Plant Outputs» (Сигналы симуляционной связи для входов и сигналов симуляционной связи для выходов установки) путь блокировки определяется автоматически для регулируемых переменных, измеряемых выходов и измеряемых возмущений. Разработчик MPC обнаруживает эти сигналы, так как они подключены к блоку контроллера MPC. Если приложение имеет неизмеренные нарушения или неизмеренные выходы, выберите соответствующие сигнальные линии Simulink.
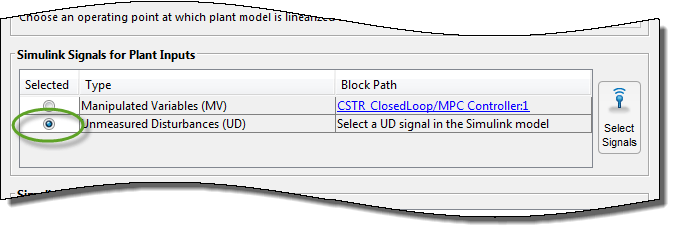
Для выбора типа сигнала используйте кнопки опции Выбранные (Selected).
Щелкните Выбрать сигналы (Select Signals).
В окне Simulink model щелкните сигнальную линию, соответствующую выбранному типу сигнала.
Сигнал подсвечивается, и его путь к блоку добавляется в диалоговое окно «Выбор сигналов».
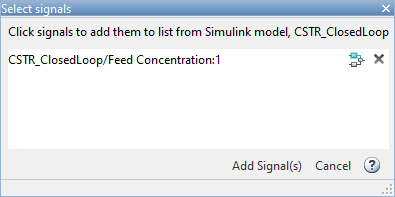
В диалоговом окне «Выбор сигналов» нажмите кнопку «Добавить сигналы».
В диалоговом окне «Определение структуры MPC по линеаризации» обновляется путь блока для выбранного типа сигнала.
Примечание
Если в модели измерены возмущения, необходимо подключить соответствующие входы установки к сигнальной линии, подключенной к md порт блока контроллера MPC. Дополнительные сведения см. в разделе Подключение измеренных возмущений для линеаризации.
Указать операционную точку
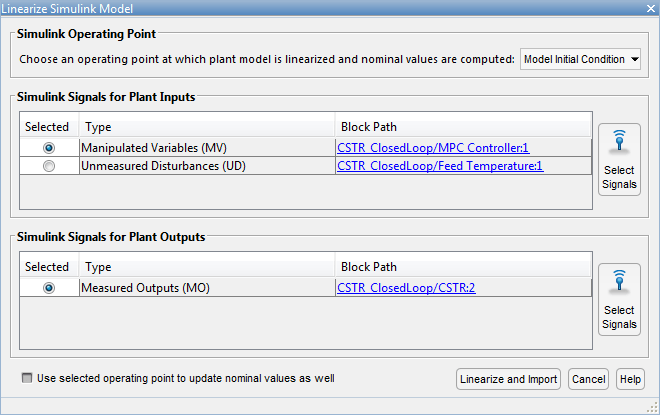
В разделе «Рабочая точка Simulink» в раскрывающемся списке выберите рабочую точку для линеаризации модели.
Сведения о различных параметрах рабочих точек см. в разделе Определение рабочих точек.
Примечание
При выборе опции, которая генерирует несколько рабочих точек для линеаризации, MPC Designer использует только первую рабочую точку для определения структуры завода и линеаризации модели.
Определение структуры и линеаризация модели
Щелкните Определить (Define) и Линеаризовать (Linearize).
Приложение линеаризует модель Simulink в указанной рабочей точке с использованием указанных входных/выходных сигналов и добавляет линеаризованную установку в браузер данных.
Кроме того, создается контроллер по умолчанию, который использует линеаризованный завод в качестве своей внутренней модели, и сценарий моделирования по умолчанию.
MPC Designer использует значения входного/выходного сигнала в выбранной рабочей точке в качестве номинальных значений.
После определения начальной структуры MPC можно линеаризовать модель Simulink в различных рабочих точках и импортировать линеаризованные заводы. Это полезно для проверки производительности контроллера на предмет ошибок моделирования.
На вкладке Конструктор MPC (MPC Designer) в разделе Импорт (Import) щелкните Линеаризация модели (Linearize Model).
Выбор входных/выходных сигналов установки
В разделах Simulink Signals for Plant Inputs и Simulink Signals for Plant Outputs конфигурация входного/выходного сигнала совпадает с конфигурацией, заданной при первоначальном определении структуры MPC.
После определения структуры изменить типы сигналов и размеры невозможно. Однако для каждого типа сигнала можно выбрать различные сигнальные линии в модели Simulink. Выбранные строки должны иметь те же размеры, которые определены в текущей структуре MPC.
Указать операционную точку
В разделе «Рабочая точка Simulink» в раскрывающемся списке выберите рабочие точки для линеаризации модели.
Сведения о различных параметрах рабочих точек см. в разделе Определение рабочих точек.
Линеаризация модели и импорт завода
Щелкните Линеаризация (Linearize) и Импорт (Import)
MPC Designer линеаризует модель Simulink в определенной рабочей точке с использованием указанных входных/выходных сигналов и добавляет линеаризованную установку в браузер данных.
При выборе опции Использовать выбранную операционную точку для обновления номинальных значений приложение обновляет номинальные значения контроллера, используя значения сигнала рабочей точки.
Если выбран параметр, который генерирует несколько операционных точек для линеаризации, приложение линеаризует модель во всех указанных операционных точках. Линеаризованные установки добавляются в браузер данных в том же порядке, в котором определяются их соответствующие рабочие точки. При обновлении номинальных значений приложение использует значения сигналов из первой рабочей точки.
В разделе «Рабочая точка Simulink» в раскрывающемся списке можно выбрать или создать рабочие точки для линеаризации модели. Дополнительные сведения о нахождении стационарных рабочих точек см. в разделах Сведения об операционных точках (Simulink Control Design) и Расчет стационарных рабочих точек из спецификаций (Simulink Control Design).
При использовании MPC Designer в MATLAB Online™ необходимо линеаризовать модель в начальных условиях модели.
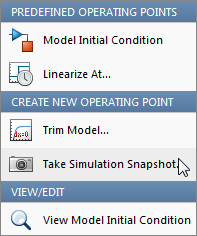
Для линеаризации модели с использованием начальных условий, заданных в модели Simulink в качестве рабочей точки, выберите Модель (Model) Начальное условие (Initial Condition).
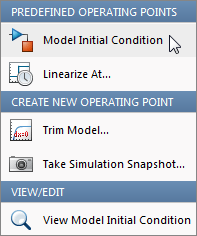
Исходное условие модели является рабочей точкой по умолчанию для линеаризации в MPC Designer.
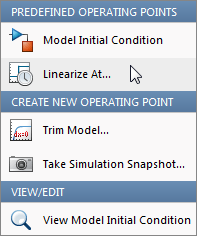
Для линеаризации модели в указанное время снимка моделирования выберите Линеаризация в (Linearize At). Линеаризация во время создания снимка полезна, если известно, что модель достигает состояния равновесия после определенного времени моделирования.
В диалоговом окне Ввод времени снимка для линеаризации в поле Время снимка моделирования введите одно или несколько времен снимка моделирования. Введите несколько раз снимка в качестве вектора.
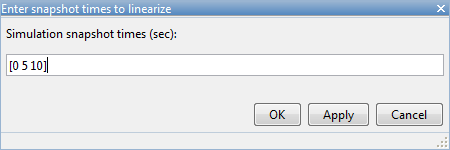
Нажмите кнопку ОК.
Если ввести несколько раз снимка и выбрать команду Линеаризация в (Linearize At) в:
Диалоговое окно Определение структуры MPC по линеаризации (Define MPC Structure By Linearization), MPC Designer выполняет линеаризацию модели только при первом снимке. Номинальные значения контроллера MPC определяются с использованием значений входного/выходного сигнала для этого снимка.
Линеаризуйте диалоговое окно Simulink Model, Проектировщик MPC линеаризует модель во все указанные времена снимка. Линеаризованные модели растений добавляются в браузер данных в порядке, указанном в массиве времени снимка. Если выбрана опция Использовать выбранную рабочую точку для обновления номинальных значений, номинальные значения устанавливаются с использованием значений входного/выходного сигнала из первого снимка.
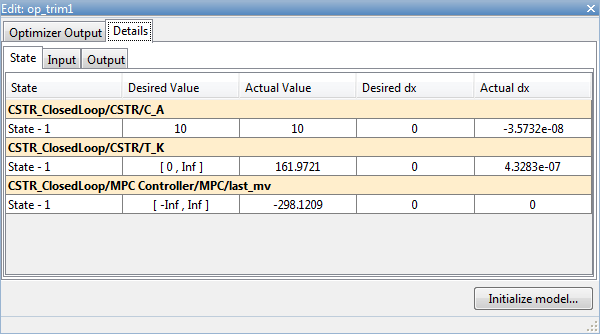
Чтобы вычислить установившуюся рабочую точку с помощью численных методов оптимизации в соответствии со спецификациями, выберите Обрезать модель (Trim Model).

В диалоговом окне Обрезать модель (Trim the model) введите спецификации установившихся значений, в которых требуется найти рабочую точку. Можно задать значения состояний, входных сигналов и выходных сигналов.
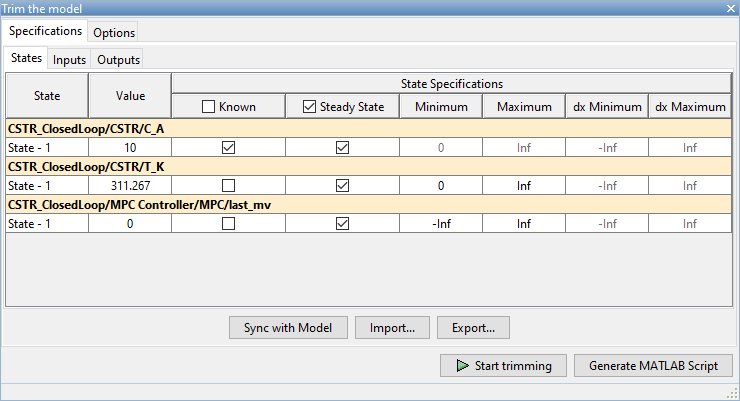
Щелкните Начало обрезки (Start Trimming).
MPC Designer создает рабочую точку для заданных спецификаций. Вычисленная операционная точка добавляется в выпадающий список Рабочая точка Simulink (Simulink Operating Point) и выбирается.
Примеры, показывающие, как задать условия для поиска установившейся рабочей точки, см. в разделе Расчет установившихся рабочих точек из спецификаций (Simulink Control Design).
Чтобы вычислить операционные точки с помощью снимков моделирования, выберите «Сделать снимок моделирования». Линеаризация модели с использованием рабочих точек, вычисленных на основе снимков моделирования, полезна, если известно, что модель достигает состояния равновесия через определенное время моделирования.
В диалоговом окне Ввод времени снимка для линеаризации в поле Время снимка моделирования введите одно или несколько времен снимка моделирования. Введите несколько раз снимка в качестве вектора.
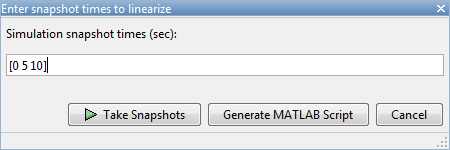
Щелкните Сделать снимки.
MPC Designer моделирует модель Simulink. В каждом моментальном снимке текущее состояние модели используется для создания рабочей точки, которая добавляется в выпадающий список и выбирается.
При вводе нескольких снимков рабочие точки сохраняются вместе как массив. Если выбран пункт Сделать снимок моделирования (Take Simulation Snapshot) в:
В диалоговом окне Определить структуру MPC по линеаризации (Define MPC Structure By Linearization) MPC Designer линеаризует модель, используя только первую операционную точку в массиве. Номинальные значения контроллера MPC определяются с использованием значений входного/выходного сигнала для этой рабочей точки.
Линеаризация модели Simulink, MPC Designer линеаризует модель во всех рабочих точках массива. Линеаризованные модели растений добавляются в браузер данных в том же порядке, что и массив операционных точек.
В MPC Designer опции Linearize At и Take Simulation Snapshot обычно создают одинаковые значения линеаризованного растительного и номинального сигнала. Однако, поскольку параметр «Получить снимок моделирования» сначала вычисляет операционную точку из снимка перед линеаризацией, результаты могут отличаться.
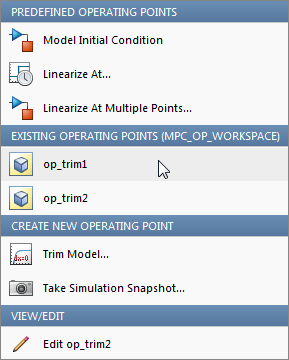
В разделе Существующие рабочие точки (Existing Operating Points) выберите ранее определенную рабочую точку для линеаризации модели Simulink. Эта опция доступна, если в раскрывающемся списке доступны одна или несколько ранее созданных операционных точек.
Если выбранная операционная точка представляет массив операционных точек, созданный с помощью нескольких снимков, и выбрана операционная точка из:
В диалоговом окне Определить структуру MPC по линеаризации (Define MPC Structure By Linearization) MPC Designer линеаризует модель, используя только первую операционную точку в массиве. Номинальные значения контроллера MPC определяются с использованием значений входного/выходного сигнала для этой рабочей точки.
Линеаризация модели Simulink, MPC Designer линеаризует модель во всех рабочих точках массива. Линеаризованные модели растений добавляются в браузер данных в том же порядке, что и массив операционных точек.
Для линеаризации модели Simulink в нескольких существующих рабочих точках выберите «Линеаризация в нескольких точках». Эта опция доступна, если в выпадающем списке имеется более одной ранее созданной операционной точки.

В диалоговом окне Указать несколько рабочих точек (Specify multiple operating points) выберите рабочие точки для линеаризации модели.
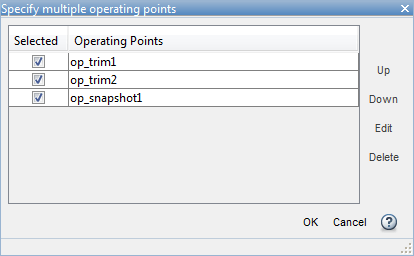
Чтобы изменить порядок рабочих точек, щелкните рабочую точку в списке и щелкните Вверх (Up) или Вниз (Down), чтобы переместить выделенную рабочую точку в списке.
Нажмите кнопку ОК.
Если выбран вариант Линеаризация в нескольких точках (Linearize at Multiple Points) в:
Диалоговое окно Определение структуры MPC по линеаризации (Define MPC Structure By Linearization), MPC Designer выполняет линеаризацию модели с использованием только первой указанной рабочей точки. Номинальные значения контроллера MPC определяются с использованием значений входного/выходного сигнала для этой рабочей точки.
Линеаризация модели симуляции (Linearize Simulink Model), MPC Designer линеаризует модель во всех указанных рабочих точках. Линеаризованные модели растений добавляются в браузер данных в порядке, указанном в диалоговом окне Указать несколько рабочих точек (Specify multiple operating points).
Чтобы просмотреть или отредактировать выбранную операционную точку, в разделе Вид/Правка (View/Edit) выберите опцию Править (Edit).

В диалоговом окне «Редактирование» можно изменить значения рабочих точек, если выбранная рабочая точка была создана на основе снимка моделирования.
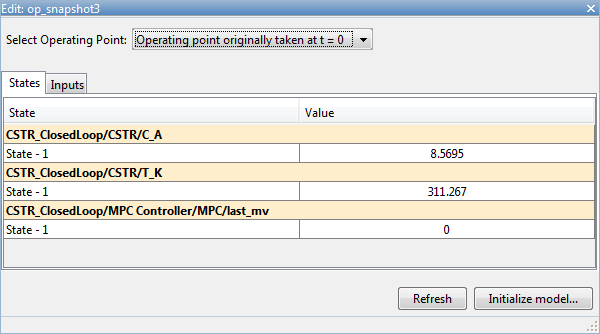
Если выбранная операционная точка представляет массив операционных точек, в раскрывающемся списке «Выбор операционной точки» выберите рабочую точку для просмотра.
Если рабочая точка была получена путем обрезки модели, можно просматривать только значения рабочих точек.
Чтобы задать начальные условия модели Simulink для состояний в рабочей точке, щелкните Инициализировать модель (Initialize model). Затем можно смоделировать модель в указанной рабочей точке.
При установке начальных условий модели MPC Designer экспортирует рабочую точку в рабочую область MATLAB. Кроме того, в диалоговом окне Параметры конфигурации Simulink (Simulink Configuration Parameters) в разделе Импорт/экспорт данных (Data Import/Export) выбираются параметры состояния Input (Ввод) и Initial (Начальный) и настраиваются для использования состояний и входов в экспортируемой операционной точке.
Чтобы сбросить исходные условия модели, например, при удалении экспортированной рабочей точки, снимите флажки «Входной» и «Начальный».
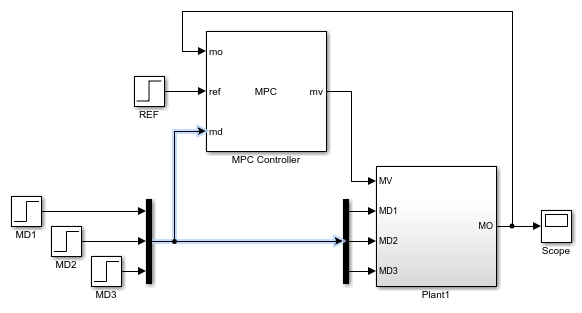
Если в модели Simulink измерены сигналы возмущения, подключите их к соответствующим входным портам установки и к md порт блока контроллера MPC. При наличии нескольких измеренных возмущений подключите их к контроллеру MPC с помощью векторного сигнала. Как описано в разделе Определение структуры MPC путем линеаризации, разработчик MPC автоматически обнаруживает измеренные возмущения, подключенные к блоку контроллера MPC, и устанавливает их в качестве входных данных установки для линеаризации.
Поскольку измеренные возмущения подключены к md порт выбран в качестве входов линеаризации, необходимо подключить входные порты измеренных возмущений установки к выбранной сигнальной линии, как показано ниже:
Правильное подключение MD
При подключении входных портов измеренных возмущений к соответствующим сигналам перед блоком мультиплексора, как показано ниже, нет пути линеаризации из сигналов в md порт к заводу. В результате при линеаризации установки с помощью MPC Designer измеренные каналы возмущений линеаризуются до нуля.
Неправильное подключение MD