Рабочая точка динамической системы определяет состояния и входные сигналы корневого уровня модели в определенное время. Например, в модели двигателя автомобиля такие переменные, как частота вращения двигателя, угол дроссельной заслонки, температура двигателя и окружающие атмосферные условия, обычно описывают рабочую точку.
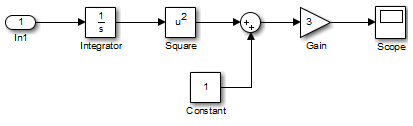
Следующая модель Simulink ® имеет операционную точку, состоящую из двух переменных:
Входной сигнал корневого уровня имеет значение 1
Состояние блока интегратора, установленное на 5
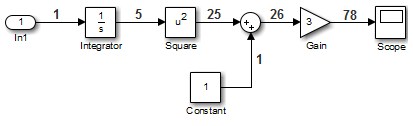
В следующей таблице приведены значения сигналов для модели в этой рабочей точке.
| Блок | Вход блока | Операция блокировки | Блочный выход |
|---|---|---|---|
| Интегратор | 1 | Интеграция входных данных | 5, задается исходным условиемx0 = 5 |
| Квадрат | 5, задается исходным состоянием блока Интегратор | Квадратный вход | 25 |
| Сумма | 25 от квадратного блока, 1 из блока константы | Суммарные вводы | 26 |
| Выгода | 26 | Умножение входного сигнала на 3 | 78 |
На следующей блок-схеме показано, как входные данные модели и исходное состояние блока интегратора распространяются через модель во время моделирования.
Если исходные состояния модели и входные данные уже представляют требуемые установившиеся рабочие условия, можно использовать эту рабочую точку для линеаризации или проектирования управления.
Установившаяся рабочая точка модели, также называемая условием равновесия или подстройки, включает переменные состояния, которые не изменяются со временем.
Модель может иметь несколько стационарных рабочих точек. Например, подвесной демпфированный маятник имеет две установившиеся рабочие точки, в которых положение маятника не изменяется со временем. Стабильная установившаяся рабочая точка возникает, когда маятник висит прямо вниз. Когда положение маятника немного отклоняется, маятник всегда возвращается в равновесие. Другими словами, небольшие изменения в рабочей точке не заставляют систему оставлять область хорошей аппроксимации вокруг величины равновесия.
Нестабильная установившаяся рабочая точка возникает, когда маятник указывает вверх. Пока маятник указывает точно вверх, он остается в равновесии. Однако, когда маятник слегка отклоняется от этого положения, он качается вниз и рабочая точка покидает область вокруг величины равновесия.
При использовании поиска оптимизации для вычисления рабочих точек для нелинейных систем начальные догадки состояний и входных уровней должны быть близки к требуемой рабочей точке, чтобы обеспечить сходимость.
При линеаризации модели с несколькими установившимися рабочими точками важно иметь правильную рабочую точку. Например, линеаризация маятниковой модели вокруг стабильной рабочей точки установившегося состояния создает стабильную линейную модель, в то время как линеаризация вокруг нестабильной рабочей точки установившегося состояния создает нестабильную линейную модель.
В программном обеспечении Simulink Control Design™ операционная точка для модели Simulink представлена операционной точкой (operpoint) объект. Объект сохраняет настраиваемые состояния модели и их значения, а также другие данные об операционной точке. Исключаются состояния блоков, имеющих внутреннее представление, такие как блоки Backlash, Memory и Stateflow ®.
Состояния, исключенные из объекта рабочей точки, не могут использоваться в вычислениях обрезки. Эти состояния не могут быть зафиксированы с помощью operspec или operpoint, или написана с помощью initopspec. Такие состояния также исключаются из отображений рабочих точек или вычислений с использованием линеаризатора модели. В следующей таблице представлено, какие состояния включены и какие исключены из объекта операционной точки.
| Тип состояния | Включено в операционную точку? |
|---|---|
| Состояния с двойной точностью и действительными значениями | Да |
Государства, значение которых не имеет типа double. Например, сложнозначные состояния, single-типовые состояния, int8- состояния типа. | Нет |
| Состояния из блоков ввода корневого уровня с вещественными входами с двойной точностью | Да |
| Внутренние представления состояний, влияющие на вывод блоков, например состояния в блоках Backlash, Memory или Stateflow. | Нет (см. раздел Обработка блоков с внутренним представлением состояния) |
| Состояния, принадлежащие блоку единичной задержки, вход которого является сигналом шины | Нет |
