В этом разделе показано, как настроить контроллер MPC для неквадратичной установки с неравным количеством управляемых переменных и выходов. Программное обеспечение Model Predictive Control Toolbox™ поддерживает установки с избытком манипулируемых переменных или установки с избытком выходных данных.
При наличии избыточных выходов невозможно удерживать каждый из них в заданной точке. В этом случае имеется два варианта:
Укажите, что определенные выходы не должны удерживаться в уставках, установив их настроечные веса на ноль.
Контроллер не устанавливает уставки на выходах с нулевым весом, и выходы могут свободно изменяться. Если у установки Ne больше выходов, чем у управляемых переменных, установка нулевых весов выходов Ne позволяет контроллеру удерживать остальные выходы в их уставках. Если какие-либо манипулируемые переменные ограничены, один или более выходных откликов все еще могут демонстрировать ошибку установившегося состояния, в зависимости от величин опорных сигналов и сигналов возмущения.
Выходные данные с нулевыми весами настройки по-прежнему могут быть полезны. При измерении контроллер может использовать выходные сигналы для оценки состояния установки. Результаты могут также использоваться в качестве показателей эффективности или удерживаться в пределах операционной области, определяемой ограничениями выпуска.
Установите уставки на всех выходах, указав ненулевые веса настройки для всех из них.
Контроллер пытается удерживать все выходы на соответствующих уставках. Однако из-за ограниченного числа манипулируемых переменных все выходные ответы демонстрируют некоторую степень ошибки установившегося состояния.
Значения ошибок можно изменить путем корректировки относительных значений весов на выходе. Увеличение выходного веса уменьшает погрешность установившегося состояния на этом выходе за счет повышенной погрешности на других выходах.
Можно настроить веса выходной настройки в командной строке, установив Weights.OutputVariables свойства контроллера.
Чтобы настроить веса выходной настройки в MPC Designer, на вкладке «Настройка» в разделе «Дизайн» нажмите кнопку «Веса», чтобы открыть диалоговое окно «Веса».
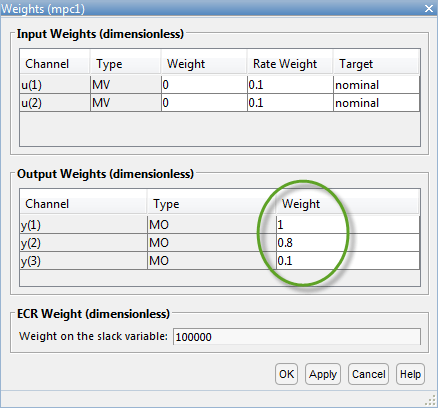
В разделе «Выходные веса» укажите вес для каждой выходной переменной. Например, если завод имеет две управляемые переменные и три выхода, можно:
Установите один из выходных весов в нуль.
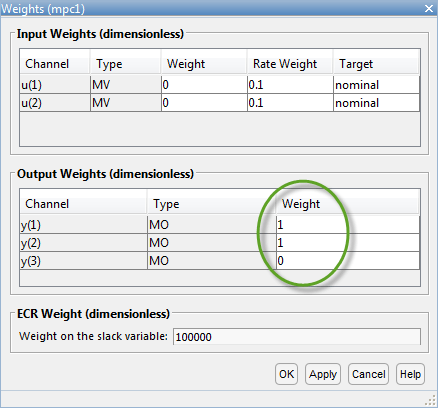
Установите для всех весов ненулевые значения. Выходы с более высокими весами демонстрируют меньшую погрешность установившегося состояния.
При наличии избыточных переменных настройки контроллера MPC по умолчанию позволяют осуществлять отслеживание выходных уставок без ошибок. Однако значения обрабатываемых переменных могут дрейфовать. Можно предотвратить этот дрейф, задав управляемые переменные уставки. При наличии избыточных переменных Ne и удерживании их Ne в целевых значениях по экономическим или операционным причинам остальные переменные с манипуляциями достигают значений, необходимых для устранения ошибки установившегося состояния вывода.
Чтобы настроить управляемую уставку переменной в командной строке, используйте ManipulatedVariables.Target свойство контроллера. Затем укажите входной настроечный вес с помощью контроллера Weights.ManipulatedVariables собственность.
Чтобы определить управляемую переменную уставку в MPC Designer, на вкладке «Настройка» в разделе «Проектирование» нажмите кнопку «Веса».
В диалоговом окне «Веса» в разделе «Входные веса» задайте ненулевое значение параметра «Вес» для управляемой переменной.
Укажите целевое значение для управляемой переменной.
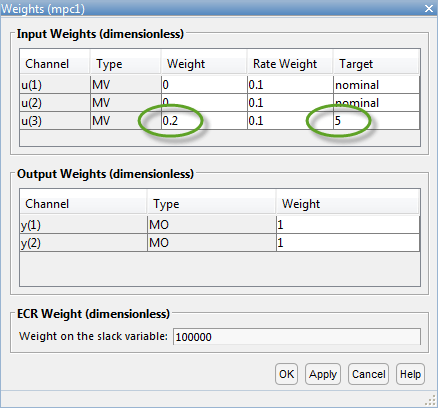
По умолчанию управляемая переменная Target имеет значение nominal, что означает, что он отслеживает номинальное значение, указанное в свойствах контроллера.
Примечание
Поскольку номинальные значения применяются ко всем контроллерам в сессии MPC Designer, изменение номинального значения обновляет все контроллеры в приложении. Целевое значение, однако, зависит от каждого отдельного контроллера.
Величина регулируемого веса указывает, насколько входной сигнал может отклоняться от его уставки. Однако существует компромисс между манипулированным отслеживанием переменной цели и отслеживанием выходного опорного сигнала. Если вы хотите иметь лучшую производительность отслеживания уставки выхода, используйте относительно небольшой входной вес. Если необходимо, чтобы управляемая переменная оставалась близкой к целевому значению, увеличьте ее входной вес относительно выходного веса.
Можно также избежать дрейфа, ограничив одну или несколько управляемых переменных узкой операционной областью с помощью жестких ограничений. Чтобы определить зависимости в MPC Designer, на вкладке «Настройка» в разделе «Проект» нажмите кнопку «Зависимости», чтобы открыть диалоговое окно «Зависимости».
В разделе «Ограничения ввода» задайте значения максимальных и минимальных ограничений.
