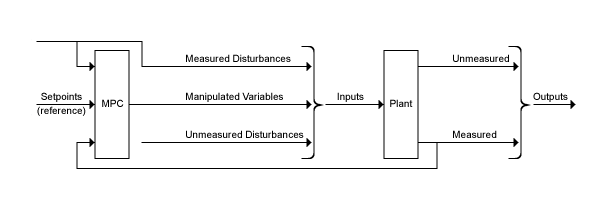
Контроллер прогнозирования модели использует линейные модели установок, возмущений и шума для оценки состояния контроллеров и прогнозирования будущих выходов установок. Используя прогнозируемые выходные сигналы установки, контроллер решает задачу оптимизации квадратичного программирования для определения оптимальных регулируемых настроек. Дополнительные сведения о структуре контроллеров прогнозирования модели см. в разделе Моделирование MPC. Используя модели установки, возмущений и шума, можно создать контроллер MPC с помощью приложения MPC Designer или в командной строке. Производительность контроллера можно моделировать в командной строке или в Simulink ®.