В этом разделе показано, как протестировать существующий контроллер прогнозирования модели путем добавления его в модель Simulink ®.
Откройте модель Simulink.
Добавьте в модель блок контроллера MPC.
Если ваш контроллер включает измеренные нарушения, добавьте md вход в блок контроллера MPC.
Дважды щелкните блок контроллера MPC.
В диалоговом окне «Параметры блока» на вкладке «Общие» выберите «Измеренное возмущение (md)».
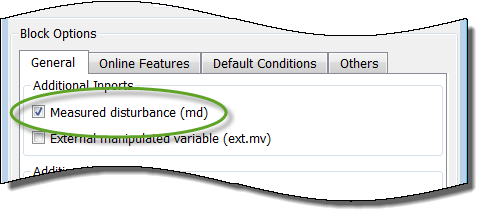
Нажмите кнопку ОК.
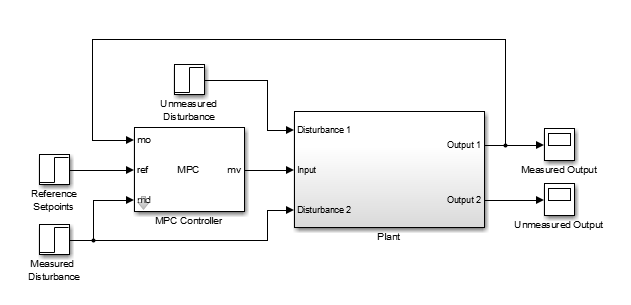
Подключите сигналы установки и контроллера в модели Simulink. Подключить:
Заводские входы в управляемую переменную (mv) ввод блока контроллера MPC.
Измеренные выходы установки к измеренным выходам (mo) ввод блока контроллера MPC.
Измеренные возмущения, если таковые имеются, для установки и измеренного возмущения (md) ввод блока контроллера MPC.
Любые неизмеренные нарушения или неизмеренные выходы на соответствующие заводские входы и выходы.
Эталонные сигналы на эталон (ref) ввод блока контроллера MPC.
Укажите контроллер.
Дважды щелкните блок контроллера MPC.
В диалоговом окне «Параметры блока» в поле «Контроллер MPC» укажите имя mpc из рабочей области MATLAB ®.
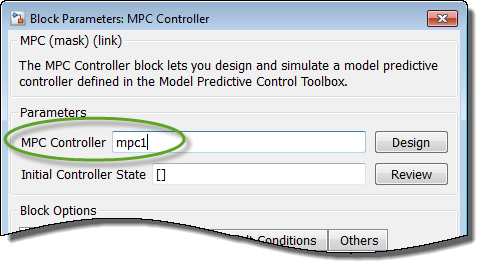
Нажмите кнопку ОК.
(Необязательно) Измените контроллер.
После указания контроллера в блоке контроллера MPC можно изменить контроллер:
Использование MPC Designer:
В диалоговом окне «Параметры блока» нажмите «Проектирование».
В MPC Designer настройте параметры контроллера.
На вкладке Конструктор MPC (MPC Designer) в разделе Результат (Result) щелкните Обновить и смоделировать (Update and Simulate) > Обновить только блок (Update Block Only).
Приложение экспортирует обновленный контроллер в рабочую область MATLAB.
Использование команд для изменения объекта контроллера в рабочей области MATLAB.
Запустите модель Simulink.
Совет
Если у вас нет модели Simulink завода, можно создать модель, использующую контроллер MPC для управления внутренней моделью завода. Дополнительные сведения см. в разделе Создание модели Simulink из MPC Designer.
mpc | Контроллер MPC | Разработчик MPC
