Измерение показателей производительности постоянного тока на выходе АЦП
Блок смешанного сигнала/АЦП/Измерения и испытания
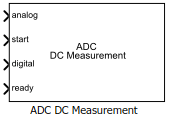
Блок измерения постоянного тока АЦП измеряет такие показатели производительности постоянного тока АЦП, как ошибка смещения, ошибка усиления, интегральная нелинейность (INL) и дифференциальная нелинейность (DNL). Блок измерения постоянного тока АЦП можно использовать для проверки архитектурных моделей АЦП, представленных в Blockset™ смешанного сигнала, или можно использовать АЦП собственной реализации.
analog - Аналоговый входной сигнал на АЦПАналоговый входной сигнал в блок АЦП, заданный как скаляр.
Типы данных: double
start - Время начала внешнего преобразованияВремя начала внешнего преобразования, указанное как скаляр. Состояние начинается при запуске процесса аналого-цифрового преобразования.
Типы данных: double
digital - Преобразованный цифровой сигнал от АЦППреобразованный цифровой сигнал от АЦП, заданный как скаляр.
Типы данных: fixed point | single | double | int8 | int16 | int32 | uint8 | uint16 | uint32
ready - Указывает, завершено ли аналого-цифровое преобразованиеУказывает, завершено ли аналого-цифровое преобразование, указанное как скаляр.
Типы данных: double
Number of bits - Количество физических битов в АЦП5 (по умолчанию) | положительное вещественное целое числоКоличество физических битов в АЦП, указанное как безразмерное положительное вещественное целое число. Количество битов должно соответствовать разрешению, указанному в блоке АЦП.
Использовать get_param(gcb,'NBits') для просмотра текущего количества битов.
Использовать set_param(gcb,'NBits',value) для установки определенного значения в поле Number of bits.
Start conversion frequency (Hz) - Частота такта преобразования запуска АЦП10e6 (по умолчанию) | положительный вещественный скалярЧастота такта начального преобразования АЦП, заданная как положительный действительный скаляр в герцах. Начальная частота преобразования должна соответствовать частоте начального тактового сигнала преобразования блока АЦП. Этот параметр используется для расчета рекомендуемого времени остановки моделирования.
Использовать get_param(gcb,'Frequency') для просмотра текущего значения начальной частоты преобразования.
Использовать set_param(gcb,'Frequency',value) чтобы задать для параметра Начальная частота преобразования определенное значение.
Input range (V) - Динамический диапазон АЦП[-1 1] (по умолчанию) | 2-элементный векторДинамический диапазон АЦП, заданный как 2-элементный вектор в V. Два векторных элемента представляют минимальное и максимальное значения динамического диапазона слева направо.
Использовать get_param(gcb,'InputRange') для просмотра текущего значения диапазона ввода.
Использовать set_param(gcb,'InputRange',value) чтобы задать для диапазона ввода определенное значение.
Hold off time (s) - Задерживает анализ измерений во избежание повреждения переходными процессами0 (по умолчанию) | неотрицательный вещественный скалярЗадерживает анализ измерений, чтобы избежать повреждения переходными процессами, заданными как неотрицательный действительный скаляр в секундах.
Использовать get_param(gcb,'HoldOffTime') для просмотра текущего значения времени ожидания.
Использовать set_param(gcb,'HoldOffTime',value) для установки определенного значения в поле Время удержания (Hold off time).
Recommended min. simulation stop time (s) - Для получения значимого результата необходимо выполнить моделирование минимального времени.6.4e-5 (по умолчанию) | положительный вещественный скалярМинимальное время, в течение которого моделирование должно выполняться для получения значимых результатов, определяемых как положительный действительный скаляр в секундах.
Для измерения постоянного тока моделирование должно выполняться таким образом, чтобы АЦП мог 20 раз производить выборку каждого цифрового кода, предполагая, что входной сигнал клина пересекает полный диапазон масштаба АЦП в течение периода моделирования. Исходя из этого предположения, аналоговая входная частота (fanalog), генерируемая блоком ADC Testbench для пилообразного сигнала, устанавливается как:
1)· 10
где StartFreq - частота такта начала преобразования, а Nbits - разрешение АЦП.
Таким образом, рекомендуемое минимальное время (и) остановки моделирования (Т) рассчитывается по формуле: 1fanalog.
Типы данных: double
Set as model stop time - Автоматически установить рекомендуемое минимальное время остановки моделирования в качестве времени остановки моделиЩелкните значок, чтобы автоматически установить рекомендуемое минимальное время остановки моделирования в качестве времени остановки модели Simulink ®.
Endpoint - Измерение DNL, INL методом конечной точкиИзмерьте ошибку дифференциальной нелинейности (DNL) и ошибку интегральной нелинейности (INL) с помощью метода конечной точки. Этот метод использует конечные точки фактической передаточной функции для измерения ошибок DNL и INL.
Best fit - Измерение DNL, INL методом наилучшего вписыванияИзмерьте ошибку дифференциальной нелинейности (DNL) и ошибку интегральной нелинейности (INL) с помощью метода наилучшего вписывания. Этот метод использует стандартный метод подбора кривой, чтобы найти наилучшее соответствие для измерения ошибок DNL и INL.
Output result to base workspace - Сохранение подробных результатов тестирования в базовом рабочем пространствеСохранение подробных результатов теста в struct в базовой рабочей области для дальнейшей обработки. По умолчанию этот параметр не выбран.
Workspace variable name - имя переменной, в которой хранятся подробные результаты теста;adc_dc_out (по умолчанию) | символьная строкаИмя переменной, в которой хранятся подробные результаты теста, указанное как символьная строка.
Этот параметр доступен только в том случае, если выбран параметр Вывод результата в базовую рабочую область (Output result to base workspace)
Использовать get_param(gcb,'VariableName') для просмотра текущего значения имени переменной рабочей области.
Использовать set_param(gcb,'VariableName',value) чтобы задать для имени переменной рабочей области определенное значение.
Plot - Результаты измерений графикаЩелкните значок, чтобы построить график результатов измерения для дальнейшего анализа.
Ошибка смещения представляет смещение кривой передаточной функции АЦП от ее идеального значения в одной точке.
Ошибка усиления представляет отклонение наклона кривой передаточной функции АЦП от ее идеального значения.
Погрешность интегральной нелинейности (INL), также называемая относительной точностью, является максимальным отклонением измеренной передаточной функции от прямой линии. Прямая линия может быть наилучшим образом подогнана с использованием стандартной методики подбора кривой или проведена между конечными точками фактической передаточной функции после регулировки усиления.
Метод наилучшего соответствия обеспечивает лучшее прогнозирование искажений в приложениях переменного тока и меньшее значение ошибки линейности. Метод конечных точек в основном используется при измерении применения преобразователей данных, поскольку бюджет ошибок зависит от фактического отклонения от идеальной передаточной функции.
Дифференциальная нелинейность (DNL) - это отклонение от идеальной разности (1 LSB) между уровнями аналогового ввода, которые запускают любые два последовательных уровня цифрового вывода. Ошибка DNL - это максимальное значение DNL, найденное при любом переходе.
Измерение переменного тока АЦП | ADC Testbench | АЦП флэш-памяти | АЦП SAR
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
