Ориентация по показаниям акселерометра и гироскопа
imufilter Система object™ плавит акселерометр и данные датчика гироскопа для оценки ориентации устройства.
Для оценки ориентации устройства:
Создать imufilter и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
FUSE = imufilterFUSE, для слияния данных акселерометра и гироскопа для оценки ориентации устройства. Фильтр использует девятиэлементный вектор состояния для отслеживания ошибки в оценке ориентации, оценке смещения гироскопа и оценке линейного ускорения.
FUSE = imufilter('ReferenceFrame',RF)imufilter Объект системы фильтрации, плавящий акселерометр и данные гироскопа для оценки ориентации устройства относительно опорного кадра RF. Определить RF как 'NED' (Север-Восток-вниз) или 'ENU' (Восток-Север-Вверх). Значение по умолчанию: 'NED'.
FUSE = imufilter(___,Name,Value)Name к указанному Value. Неопределенные свойства имеют значения по умолчанию.
FUSE = imufilter('SampleRate',200,'GyroscopeNoise',1e-6) создает объект System, FUSEс частотой дискретизации 200 Гц и шумом гироскопа, установленным в 1e-6 радиан в секунду в квадрате.[ Для вычисления ориентации и измерения угловой скорости плавятся показания акселерометра и гироскопа. Алгоритм предполагает, что устройство неподвижно перед первым вызовом.orientation,angularVelocity] = FUSE(accelReadings,gyroReadings)
Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
Загрузить rpy_9axis файл, содержащий записанные данные датчика акселерометра, гироскопа и магнитометра от устройства, колеблющегося по тангажу (вокруг оси y), затем по рысканию (вокруг оси z), а затем по крену (вокруг оси x). Файл также содержит частоту дискретизации записи.
load 'rpy_9axis.mat' sensorData Fs accelerometerReadings = sensorData.Acceleration; gyroscopeReadings = sensorData.AngularVelocity;
Создание imufilter Системная object™ с частотой дискретизации, установленной на частоту дискретизации данных датчика. Укажите коэффициент прореживания, равный двум, чтобы снизить вычислительную стоимость алгоритма.
decim = 2; fuse = imufilter('SampleRate',Fs,'DecimationFactor',decim);
Сдать показания акселерометра и гироскопа в imufilter объект, fuseдля вывода оценки ориентации корпуса датчика во времени. По умолчанию ориентация выводится как вектор кватернионов.
q = fuse(accelerometerReadings,gyroscopeReadings);
Ориентация определяется угловым смещением, необходимым для поворота родительской системы координат на дочернюю систему координат. Постройте график ориентации в углах Эйлера в градусах по времени.
imufilter слияние правильно оценивает изменение ориентации от предполагаемой начальной ориентации, обращенной на север. Однако ось X устройства при записи указывала на юг. Чтобы правильно оценить ориентацию относительно истинной начальной ориентации или относительно NED, используйте ahrsfilter.
time = (0:decim:size(accelerometerReadings,1)-1)/Fs; plot(time,eulerd(q,'ZYX','frame')) title('Orientation Estimate') legend('Z-axis', 'Y-axis', 'X-axis') xlabel('Time (s)') ylabel('Rotation (degrees)')

Моделирование наклонного IMU, который содержит акселерометр и гироскоп с помощью imuSensor object™ системы. Используйте идеальные и реалистичные модели для сравнения результатов отслеживания ориентации с помощью imufilter Системный объект.
Загрузите структуру, описывающую движение «земля-истина» и частоту дискретизации. Структура движения описывает последовательные повороты:
рыскание: 120 градусов в течение двух секунд
шаг: 60 градусов в течение одной секунды
крен: 30 градусов в течение половины секунды
крен: -30 градусов в течение половины секунды
шаг: -60 градусов в течение одной секунды
рыскание: -120 градусов в течение двух секунд
На последнем этапе структура движения объединяет 1-е, 2-е и 3-е вращения в одноосное вращение. Ускорение, угловая скорость и ориентация определяются в локальной системе координат NED.
load y120p60r30.mat motion fs accNED = motion.Acceleration; angVelNED = motion.AngularVelocity; orientationNED = motion.Orientation; numSamples = size(motion.Orientation,1); t = (0:(numSamples-1)).'/fs;
Создайте идеальный объект датчика IMU и объект фильтра IMU по умолчанию.
IMU = imuSensor('accel-gyro','SampleRate',fs); aFilter = imufilter('SampleRate',fs);
В цикле:
Моделирование выходного сигнала IMU путем подачи движения «земля-истина» на объект датчика IMU.
Фильтрация выходных данных IMU с помощью объекта фильтра IMU по умолчанию.
orientation = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientation(i) = aFilter(accelBody,gyroBody); end release(aFilter)
Постройте график ориентации с течением времени.
figure(1) plot(t,eulerd(orientation,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Ideal IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')

Изменение свойств imuSensor для моделирования реальных датчиков. Снова запустите цикл и постройте график оценки ориентации с течением времени.
IMU.Accelerometer = accelparams( ... 'MeasurementRange',19.62, ... 'Resolution',0.00059875, ... 'ConstantBias',0.4905, ... 'AxesMisalignment',2, ... 'NoiseDensity',0.003924, ... 'BiasInstability',0, ... 'TemperatureBias', [0.34335 0.34335 0.5886], ... 'TemperatureScaleFactor',0.02); IMU.Gyroscope = gyroparams( ... 'MeasurementRange',4.3633, ... 'Resolution',0.00013323, ... 'AxesMisalignment',2, ... 'NoiseDensity',8.7266e-05, ... 'TemperatureBias',0.34907, ... 'TemperatureScaleFactor',0.02, ... 'AccelerationBias',0.00017809, ... 'ConstantBias',[0.3491,0.5,0]); orientationDefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationDefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(2) plot(t,eulerd(orientationDefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')

Способность imufilter для отслеживания данных «земля-истина» при моделировании реалистичного IMU значительно уменьшается. Чтобы повысить производительность, измените свойства imufilter объект. Эти значения определяли эмпирически. Снова запустите цикл и постройте график оценки ориентации с течением времени.
aFilter.GyroscopeNoise = 7.6154e-7; aFilter.AccelerometerNoise = 0.0015398; aFilter.GyroscopeDriftNoise = 3.0462e-12; aFilter.LinearAccelerationNoise = 0.00096236; aFilter.InitialProcessNoise = aFilter.InitialProcessNoise*10; orientationNondefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationNondefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(3) plot(t,eulerd(orientationNondefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Nondefault IMU Filter') legend('Z-axis','Y-axis','X-axis')

Количественная оценка улучшенной производительности измененного imufilter, постройте график расстояния кватерниона между движением земля-истина и ориентацией, возвращенной imufilter со свойствами по умолчанию и не по умолчанию.
qDistDefault = rad2deg(dist(orientationNED,orientationDefault)); qDistNondefault = rad2deg(dist(orientationNED,orientationNondefault)); figure(4) plot(t,[qDistDefault,qDistNondefault]) title('Quaternion Distance from True Orientation') legend('Realistic IMU Data, Default IMU Filter', ... 'Realistic IMU Data, Nondefault IMU Filter') xlabel('Time (s)') ylabel('Quaternion Distance (degrees)')

В этом примере показано, как удалить смещение гироскопа из IMU с помощью imufilter.
Использовать kinematicTrajectory для создания траектории с двумя деталями. Первая часть имеет постоянную угловую скорость вокруг осей y и z. Вторая часть имеет изменяющуюся угловую скорость во всех трех осях.
duration = 60*8; fs = 20; numSamples = duration * fs; rng('default') % Seed the RNG to reproduce noisy sensor measurements. initialAngVel = [0,0.5,0.25]; finalAngVel = [-0.2,0.6,0.5]; constantAngVel = repmat(initialAngVel,floor(numSamples/2),1); varyingAngVel = [linspace(initialAngVel(1), finalAngVel(1), ceil(numSamples/2)).', ... linspace(initialAngVel(2), finalAngVel(2), ceil(numSamples/2)).', ... linspace(initialAngVel(3), finalAngVel(3), ceil(numSamples/2)).']; angVelBody = [constantAngVel; varyingAngVel]; accBody = zeros(numSamples,3); traj = kinematicTrajectory('SampleRate',fs); [~,qNED,~,accNED,angVelNED] = traj(accBody,angVelBody);
Создание imuSensor object™ системы, IMU, с неидеальным гироскопом. Звонить IMU с ускорением «земля-истина», угловой скоростью и ориентацией.
IMU = imuSensor('accel-gyro', ... 'Gyroscope',gyroparams('RandomWalk',0.003,'ConstantBias',0.3), ... 'SampleRate',fs); [accelReadings, gyroReadingsBody] = IMU(accNED,angVelNED,qNED);
Создание imufilter Системный объект, fuse. Звонить fuse с моделируемыми показаниями акселерометра и гироскопа.
fuse = imufilter('SampleRate',fs, 'GyroscopeDriftNoise', 1e-6); [~,angVelBodyRecovered] = fuse(accelReadings,gyroReadingsBody);
Постройте график угловой скорости «земля-истина», показаний гироскопа и восстановленной угловой скорости для каждой оси.
Угловая скорость, возвращенная из imufilter компенсирует эффект смещения гироскопа во времени и сходится к истинной угловой скорости.
time = (0:numSamples-1)'/fs; figure(1) plot(time,angVelBody(:,1), ... time,gyroReadingsBody(:,1), ... time,angVelBodyRecovered(:,1)) title('X-axis') legend('True Angular Velocity', ... 'Gyroscope Readings', ... 'Recovered Angular Velocity') ylabel('Angular Velocity (rad/s)')

figure(2) plot(time,angVelBody(:,2), ... time,gyroReadingsBody(:,2), ... time,angVelBodyRecovered(:,2)) title('Y-axis') ylabel('Angular Velocity (rad/s)')

figure(3) plot(time,angVelBody(:,3), ... time,gyroReadingsBody(:,3), ... time,angVelBodyRecovered(:,3)) title('Z-axis') ylabel('Angular Velocity (rad/s)') xlabel('Time (s)')

Примечание.Следующий алгоритм применяется только к опорному кадру NED.
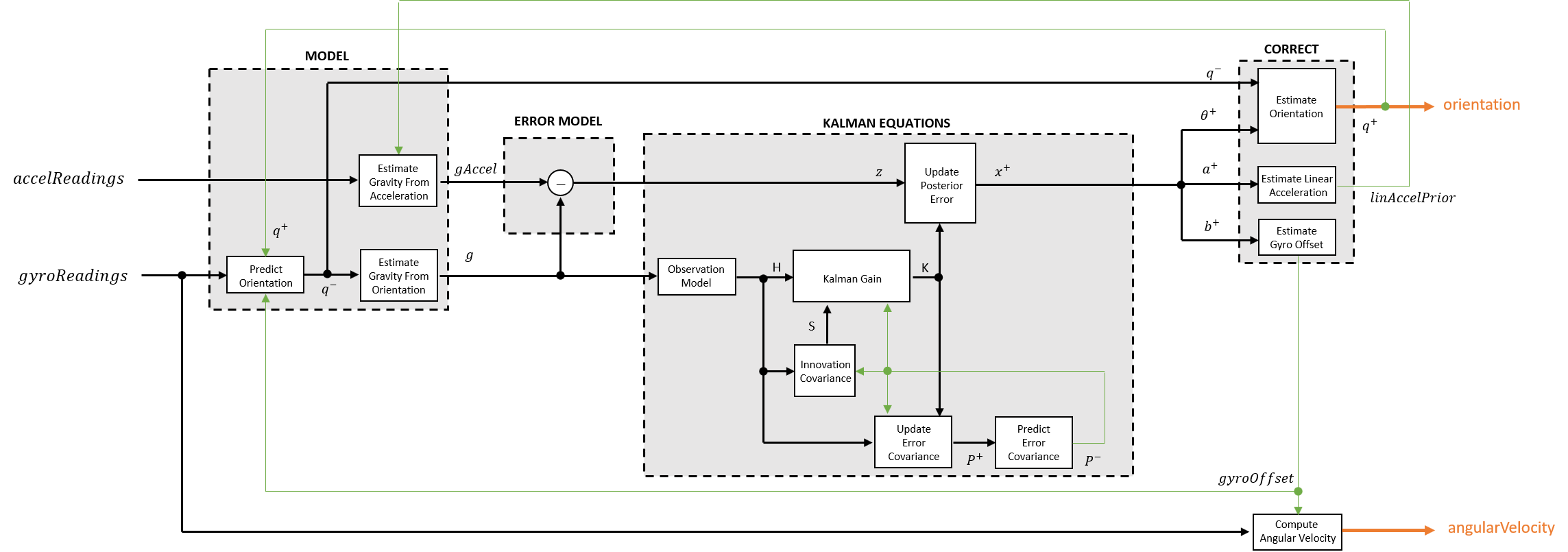
imufilter использует шестиосную структуру фильтра Калмана, описанную в [1]. Алгоритм пытается отследить ошибки ориентации, смещения гироскопа и линейного ускорения для вывода конечной ориентации и угловой скорости. Вместо непосредственного отслеживания ориентации косвенный фильтр Калмана моделирует процесс ошибок x с рекурсивным обновлением:
1ak − 1] + wk
где xk - вектор 9 на 1, состоящий из:
startk -- вектор ошибки ориентации 3 на 1, в градусах, в момент времени k
bk -- вектор смещения нулевой угловой скорости гироскопа 3 на 1, в град/с, в момент времени k
ak -- вектор ошибки ускорения 3 на 1, измеренный в кадре датчика, в g, в момент времени k
wk -- вектор аддитивного шума 9 на 1
Fk -- модель перехода к состоянию
Поскольку xk определяется как процесс ошибки, априорная оценка всегда равна нулю, и поэтому модель перехода состояния Fk равна нулю. Это понимание приводит к следующему уменьшению стандартных уравнений Калмана:
Стандартные уравнения Калмана:
Sk) − 1xk + = xk − + Kkykpk
Уравнения Калмана, используемые в этом алгоритме:
+ = KkykPk + = Pk − − KkHkPk −
где
xk − -- прогнозируемая (априорная) оценка состояния; процесс ошибки
Pk − -- предсказанная (априорная) оценка ковариации
yk -- инновации
Sk - инновационная ковариация
Kk -- Kalman gain
xk + -- обновленная (a posteriori) оценка состояния
Pk + -- обновленная (a posteriori) оценка ковариации
k представляет итерацию, верхний индекс + представляет апостериорную оценку, а верхний индекс − представляет априорную оценку.
На рисунке и последующих шагах описывается итерация на основе одного кадра в алгоритме.
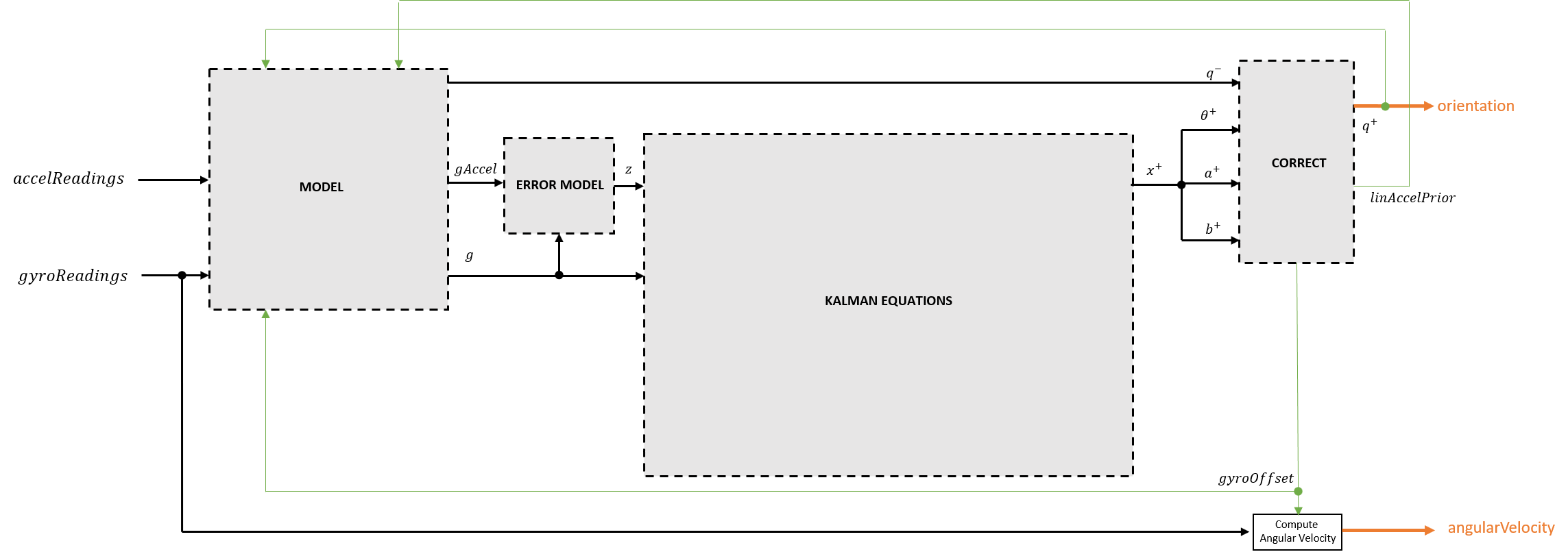
Перед первой итерацией accelReadings и gyroReadings входы секционированы в кадры 1 на 3 и DecimationFactor-на-3 кадра соответственно. Алгоритм использует самые последние показания акселерометра, соответствующие порции показаний гироскопа.
Выполните пошаговое описание алгоритма для пояснения каждого этапа подробного обзора.
Алгоритм моделирует ускорение и угловое изменение как линейные процессы.
Ориентацию для текущего кадра прогнозируют путем первой оценки углового изменения по сравнению с предыдущим кадром:
gyroOffset1 × 3) fs
где N - коэффициент прореживания, заданный DecimationFactor свойство, и fs - частота выборки, указанная SampleRate собственность.
Угловое изменение преобразуется в кватернионы с помощью rotvec
quaternion строительный синтаксис:
rotvec')
Предыдущая оценка ориентации обновляется путем ее поворота на ΔQ:
∏n=1NΔQn)
Во время первой итерации оценка ориентации, q −, инициализируется ecompass с предположением, что ось X указывает на север.
Вектор гравитации интерпретируется как третий столбец кватерниона, q −, в матричной форме вращения:
(:, 3)) T
Посмотрите ecompass для объяснения того, почему третий столбец rPrior можно интерпретировать как вектор гравитации.
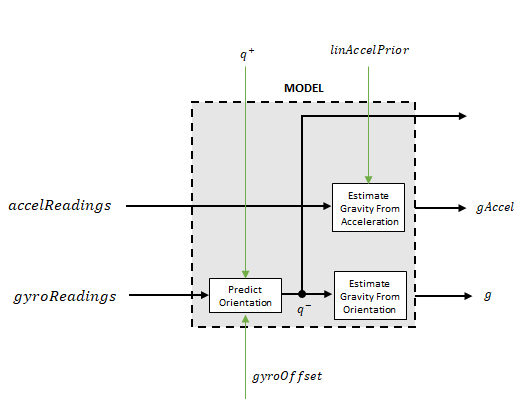
Вторую оценку вектора гравитации производят путем вычитания оценки затухшего линейного ускорения предыдущей итерации из показаний акселерометра:
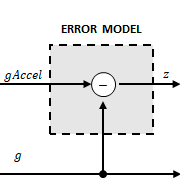
Модель погрешности представляет собой разность между оценкой гравитации по показаниям акселерометра и оценкой гравитации по показаниям гироскопа: gAccel.
Уравнения Калмана используют оценку гравитации, полученную из показаний гироскопа, g, и наблюдения за процессом ошибок, z, для обновления матриц усиления Калмана и промежуточной ковариации. Коэффициент усиления Калмана применяется к сигналу ошибки z для вывода апостериорной оценки ошибки x +.
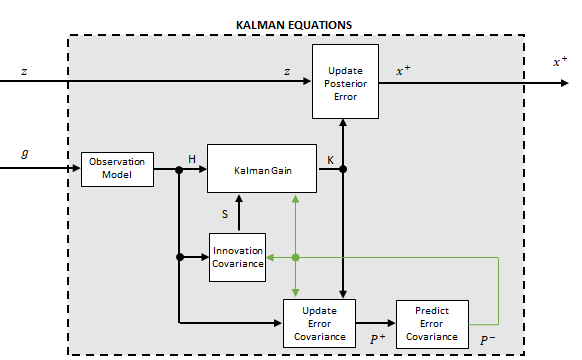
Модель наблюдения отображает наблюдаемое состояние 1 на 3, g, в истинное состояние 3 на 9, Н.
Модель наблюдения строится следующим образом:
где gx, gy и gz - x-, y- и z-элементы вектора гравитации, оцененные по ориентации, соответственно. δ - константа, определяемая свойствами SampleRate и DecimationFactor: DecimationFactor/SampleRate.
Инновационная ковариация представляет собой матрицу 3 на 3, используемую для отслеживания изменчивости измерений. Инновационную ковариационную матрицу рассчитывают как:
(H3x9) T
где
H - матрица модели наблюдения
P − - предсказанная (априорная) оценка ковариации модели наблюдения, вычисленная в предыдущей итерации
R - ковариация шума модели наблюдения, вычисленная как:
100010001].
Дисперсию шума модели наблюдения определяют следующие свойства:
β -- Гироскопический шум
start-- Гироссовый шум
λ -- Ускорение Шум
start-- Линейный уровень шума
Ковариация оценки ошибок представляет собой матрицу 9 на 9, используемую для отслеживания изменчивости состояния.
Ковариационная матрица оценки ошибок обновляется следующим образом:
где K - коэффициент усиления Калмана, H - матрица измерения, а P − - ковариация оценки ошибок, вычисленная во время предыдущей итерации.
Ковариация оценки ошибок представляет собой матрицу 9 на 9, используемую для отслеживания изменчивости состояния. Априорная оценка ошибки ковариации, P −, устанавливается на ковариацию шума процесса, Q, определенную во время предыдущей итерации. Q вычисляется как функция ковариации оценки апостериорной ошибки P +. При вычислении Q предполагается, что члены взаимной корреляции ничтожны по сравнению с членами автокорреляции и установлены в нуль:
(61) + ξ000000000ν2P + (71) + ξ000000000ν2P + (81) + ξ]
где
P + - обновленная (a posteriori) ковариация оценки ошибки
β -- Гироскопический шум
start-- Гироссовый шум
start-- Коэффициент декайфактора LinearAcclerationDecayFactor
start-- Линейный уровень шума
Деривация терминов матрицы ошибок процесса приведена в разделе 10.1 [1].
Матрица усиления Калмана - это матрица 9 на 3, используемая для взвешивания нововведения. В этом алгоритме нововведение интерпретируется как процесс ошибки, z.
Матрица усиления Калмана построена как:
((S3 × 3) T) − 1
где
P- - предсказанная ковариация ошибки
H -- модель наблюдения
S -- инновационная ковариация
Оценку апостериорной ошибки определяют объединением матрицы усиления Калмана с ошибкой в оценках вектора гравитации:
(z1 × 3) T
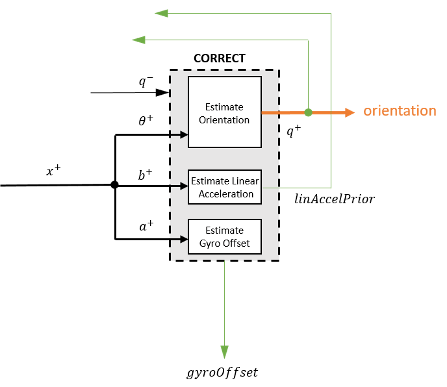
Оценка ориентации обновляется путем умножения предыдущей оценки на ошибку:
(λ +)
Оценка линейного ускорения обновляется путем затухания оценки линейного ускорения из предыдущей итерации и вычитания ошибки:
где
Оценка смещения гироскопа обновлена, вычтя ошибку смещения гироскопа из смещения гироскопа от предыдущего повторения:
1 − a +
[1] Слияние датчиков с открытым исходным кодом. https://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docs
[2] Роетенберг, Д., Х.Ж. Луинге, К.Т.М. Батен и П.Х. Велтинк. «Компенсация магнитных возмущений улучшает инерционное и магнитное восприятие ориентации сегмента человеческого тела». Сделки IEEE по нейронным системам и инженерии реабилитации. Том 13. Выпуск 3, 2005, стр. 395-405.
ahrsfilter | ecompass | gpsSensor | imuSensor
