Команды управления линейной и угловой скоростью
Инструментарий робототехнической системы/Алгоритмы мобильных роботов
Панель инструментов навигации/Алгоритмы управления
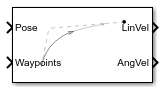
Блок Pure Purchasion вычисляет команды линейной и угловой скорости для следования по пути с использованием набора ППМ и текущей позы транспортного средства с дифференциальным приводом. Блок принимает обновленные положения для обновления команд скорости для транспортного средства, чтобы следовать по пути вдоль желаемого набора ППМ. Параметры Максимальная угловая скорость и Желательная линейная скорость используются для обновления скоростей на основе характеристик транспортного средства.
Параметр расстояния Lookahead вычисляет точку заглядывания на пути, которая является мгновенной локальной целью для транспортного средства. Команда угловой скорости вычисляется на основе этой точки. Изменение расстояния Lookahead оказывает значительное влияние на производительность алгоритма. Более высокое расстояние заглядывания вперед приводит к более плавной траектории для транспортного средства, но может привести к тому, что транспортное средство срежет углы вдоль траектории. Слишком низкое расстояние заглядывания вперед может привести к колебаниям в отслеживании пути, вызывая нестабильное поведение. Дополнительные сведения об алгоритме чистого преследования см. в разделе Контроллер чистого преследования.
binaryOccupancyMap | controllerVFH | occupancyMap | occupancyMap | binaryOccupancyMap (инструментарий робототехнической системы)
