Сферические базисные векторы в матричной форме 3 на 3
Сферические базисные векторы - это локальный набор базисных векторов, которые указывают вдоль радиального и углового направлений в любой точке пространства.
Сферические базисные векторы e ^ el) в точке (az, el) могут быть выражены в терминах декартовых единичных векторов на
(el) cos (az) i ^ − sin (el) sin (az) j ^ + cos (el) k ^.
Этот набор базисных векторов может быть выведен из локального декартова базиса двумя последовательными поворотами: сначала поворотом декартовых векторов вокруг оси y на отрицательный угол возвышения, -el, затем поворотом вокруг оси z на азимутальный угол, az. Символически, мы можем писать
el = Rz (az) Ry (− el) [001]
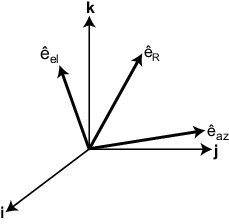
На следующем рисунке показана взаимосвязь между сферическим базисом и локальными декартовыми единичными векторами.
MATLAB ® вычисляет матрицуA из уравнений
A = [cosd(el)*cosd(az), -sind(az), -sind(el)*cosd(az); ... cosd(el)*sind(az), cosd(az), -sind(el)*sind(az); ... sind(el), 0, cosd(el)];
