Глобальная система координат описывает арену, в которой происходит радиолокационное или гидроакустическое моделирование. В пределах этой арены можно разместить радиолокационные или гидроакустические передатчики и приёмники, а также цели. Эти объекты могут быть стационарными или движущимися. Расположение и движение этих объектов задаются в глобальных координатах.
Можно моделировать движение всех объектов с помощью phased.Platform object™ системы. Этот объект System вычисляет положение и скорость объектов с использованием моделей постоянной скорости или постоянного ускорения.
Можно моделировать сигналы, распространяющиеся между объектами в сценарии. Траектории лучей, соединяющие передатчики, цели и приемники, задаются в глобальных координатах. Можно распространять сигналы с помощью следующих системных объектов: phased.FreeSpace, phased.WidebandFreeSpace, phased.LOSChannel, или phased.WidebandLOSChannel. При моделировании двухлучевого многолучевого распространения с использованием twoRayChannel (Radar Toolbox), граничная плоскость устанавливается на z = 0 в глобальной системе координат.
При взаимодействии сигналов с датчиками или целями взаимодействие почти всегда определяется как функция датчика или локальных координат цели. Локальные системы координат крепятся к антеннам и микрофонам, фазированным массивам и целям. Они перемещаются и вращаются вместе с объектом. Локальные координаты обычно адаптируются к форме и симметрии объекта.
Поскольку сигналы распространяются в глобальной системе координат, необходимо иметь возможность преобразования локальных координат в глобальные координаты. Это можно сделать, построив ортонормированную матрицу координатных осей 3 на 3. Столбцы матрицы представляют три ортогональных вектора направления локальных координат, выраженных в глобальной системе координат. Координатные оси локальной системы координат должны быть ортонормированными, но они не должны быть параллельными глобальным координатным осям.
Когда вам нужно вычислить диапазон и углы прихода сигнала, вы можете использовать rangeangle функция. При вызове этой функции с положением источника и приемника, выраженным в глобальных координатах, функция возвращает углы диапазона и прибытия, азимут и отметку относительно осей глобальной системы. Однако при передаче матрицы ориентации в качестве дополнительного аргумента азимут и отметка теперь определяются относительно локальной системы координат.
Для определения используются локальные координаты
расположение и ориентация антенных или микрофонных элементов решетки. Диаграмма направленности антенной решетки зависит от угла прихода или излучения по отношению к локальным координатам решетки.
отраженная энергия от цели является функцией углов падения и отражения относительно целевых локальных координатных осей.
Два примера локальных систем координат:
самолет может иметь локальную систему координат с осью X, выровненной вдоль оси фюзеляжа корпуса, и осью Y, направленной вдоль крыла порта. Выберите ось Z для формирования правой системы координат.
установленная на транспортном средстве планарная фазированная решетка может иметь локальную систему координат, адаптированную к решетке. Ось X системы координат может быть направлена вдоль вектора нормали массива.
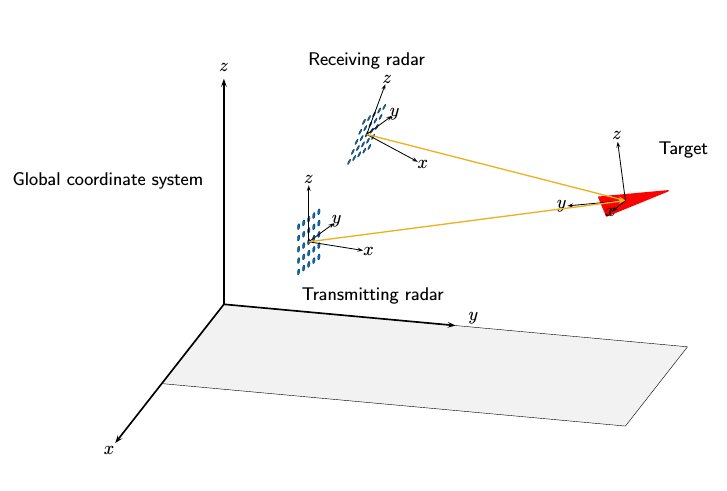
Следующий рисунок иллюстрирует взаимосвязь локальных и глобальных систем координат в бистатическом радиолокационном сценарии. Толстые сплошные линии представляют координатные оси глобальной системы координат. Существуют два фазированных массива: передающий равномерный прямоугольный массив (URA) 5 на 5 и принимающий URA 5 на 5. Каждый из фазированных массивов имеет собственную локальную систему координат. Цель, обозначенная красной стрелкой, также несет локальную систему координат.
В следующих разделах рассматриваются локальные системы координат, используемые массивами.
Положения элементов любого массива Toolbox™ системы фазированных массивов всегда определяются в локальной системе координат. При использовании любого из объектов System, создающих однородные массивы, позиции элементов массива определяются автоматически относительно предопределенной локальной системы координат. Массивы, для которых содержится это свойство, являются phased.ULA, phased.URA, phased.UCA, phased.HeterogeneousULA, и phased.HeterogeneousURA Системные объекты. Для этих системных объектов массивы описываются с использованием нескольких параметров, таких как интервал между элементами и количество элементов. Затем определяют положения элементов относительно начала координат массива, расположенного в точке (0,0,0), которая является геометрическим центром массива. Геометрический центр является хорошим приближением к центру фазы массива. Фазовый центр матрицы - это точка, из которой излучающие волны, по-видимому, излучаются при наблюдении в дальнем поле. Например, для ULA с нечетным числом элементов элементы располагаются на расстояниях (-2d, -d, 0, d, 2d) вдоль оси массива.
Существуют системные объекты массива, для которых необходимо явно указать координаты элемента. Эти объекты можно использовать для создания произвольных фигур массива. Эти объекты являются phased.ConformalArray и phased.HeterogeneousConformalArray Системные объекты. Для этих массивов фазовый центр массива не обязательно должен совпадать с началом координат массива или геометрическим центром.
Направления бурного визирования элемента. В дополнение к позициям элементов необходимо указать ориентации элементов, то есть направления, в которых они находятся. Некоторые элементы сильно направлены - большая часть их излучаемой энергии течёт в одном направлении, называемом главной осью отклика (MRA). Другие вездесущие. Ориентация элемента - направление указания MRA. Ориентация элемента задается по азимуту и отметке в локальной системе координат массива. Направление, с которым антенна или микрофон MRA сталкиваются при передаче или приеме сигнала, также называется направлением визирования или взгляда. Для однородных массивов все направления визирования всех элементов определяются параметрами массива. Для конформных массивов направление визирования каждого элемента задается независимо.
Начало массива и центр фазы. Однородная линейная решетка (ULA) - решетка антенных или микрофонных элементов, равноудаленных по прямой. На панели инструментов системы фазированных массивов phased.ULA Системный объект создает массив ULA. Геометрия ориентации элементов ULA определяется тремя параметрами: количеством элементов, расстоянием между элементами и ArrayAxis собственность. Для ULA локальная система координат адаптируется к массиву - элементам автоматически назначаются позиции в локальной системе координат.
Положения элементов в массиве определяются ArrayAxis свойство, которое может принимать значения 'x', 'y' или 'z'. Свойство оси массива определяет ось, на которой определяются все элементы. Например, когда ArrayAxis свойство имеет значение 'x'элементы массива расположены вдоль оси X. Элементы расположены симметрично относительно начала координат. Поэтому геометрический центр массива лежит в начале системы координат.
На этом рисунке показана четырехэлементная ULA с направленными элементами в локальной правой системе координат. Элементы лежат на оси Y, а их оси визирования направлены в направлении X. В этом случае ArrayAxis свойство имеет значение 'y.
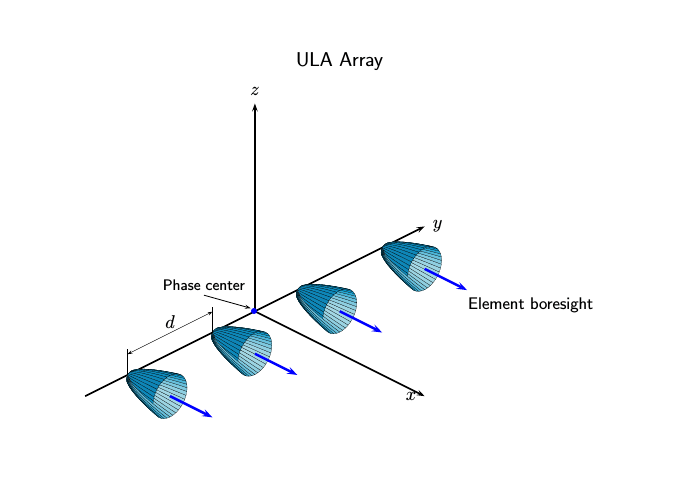
Направление бурного визирования элемента ULA. В ULA направления визирования каждого элемента указывают на одно и то же направление. Направление ортогонально оси массива. Это направление зависит от выбора ArrayAxis собственность.
| Значение свойства ArrayAxis | Положения элементов и направления бурного визирования |
|---|---|
'x' | Элементы массива расположены на оси X. Векторы визирования элементов указывают вдоль оси Y. |
'y' | Элементы массива лежат на оси Y. Векторы визирования элементов указывают вдоль оси X. |
'z' | Элементы массива расположены на оси Z. Векторы визирования элементов указывают вдоль оси X. |
Локальные координаты, адаптированные к однородному линейному массиву
Создайте два примера однородного линейного массива и отобразите координаты элементов относительно локальных систем координат, определенных массивами.
Сначала создайте 4-элементную ULA с интервалом между элементами в полметра.
sULA = phased.ULA('NumElements',4,'ElementSpacing',0.5); ElementLocs = getElementPosition(sULA)
ElementLocs = 3×4
0 0 0 0
-0.7500 -0.2500 0.2500 0.7500
0 0 0 0
viewArray(sULA)

Начало локальной системы координат, ориентированной на массив, устанавливается в центр фазы массива. Центр фазы - это среднее значение положений элементов массива.
disp(mean(ElementLocs'))
0 0 0
Поскольку массив имеет четное число элементов, ни один элемент массива фактически не находится в центре фазы (0,0,0).
Затем постройте 5-элементную ULA с тридцатисантиметровым интервалом между элементами.
sULA1 = phased.ULA('NumElements',5,'ElementSpacing',0.3); ElementLocs = getElementPosition(sULA1)
ElementLocs = 3×5
0 0 0 0 0
-0.6000 -0.3000 0 0.3000 0.6000
0 0 0 0 0
viewArray(sULA1)

Поскольку массив имеет нечетное количество элементов в каждой строке и столбце, центральный элемент массива находится в центре фазы.
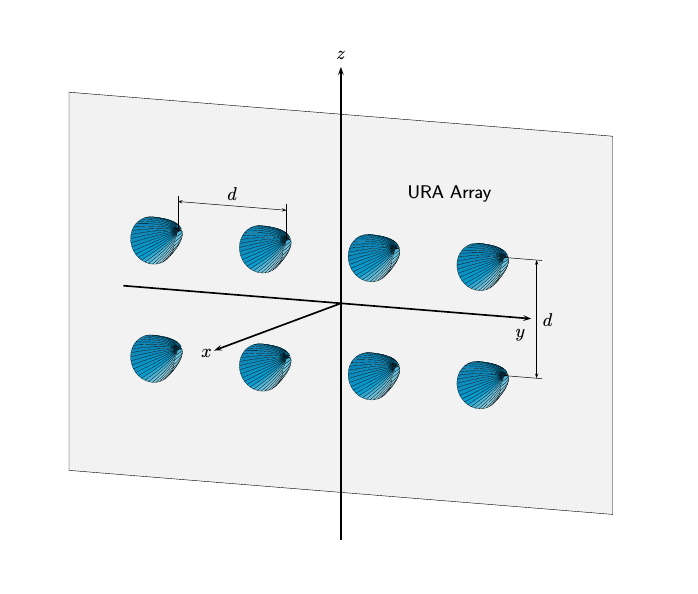
Начало массива и центр фазы. Однородная прямоугольная решетка (URA) - решетка антенных или микрофонных элементов, размещённая на регулярной двумерной сетке. Геометрия URA и расположение и ориентация его элементов определяются несколькими параметрами: размерами массива, расстоянием между элементами и ArrayNormal собственность. Для URA локальная система координат адаптируется к массиву - элементам автоматически назначаются позиции в локальной системе координат. Начало локальной системы координат - это геометрический центр массива. Фазовый центр массива совпадает с геометрическим центром. Элементам автоматически назначаются позиции в этой локальной системе координат. Позиции определяются ArrayNormal свойство, которое может принимать значения 'x', 'y' или 'z'. Все элементы лежат в плоскости, проходящей через начало координат и перпендикулярной оси, указанной в этом свойстве. Например, когда ArrayNormal свойство имеет значение 'x'элементы массива лежат в плоскости yz, как показано на рисунке. На рисунке показан 2 на 4 элемент URA с элементами, расположенными на расстоянии d метров друг от друга в направлениях y и z.
Направление бурного визирования элемента. В URA, как и ULA, направления визирования каждого элемента указывают в одном направлении. Управление этим направлением осуществляется с помощью ArrayNormal собственность. Для URA, показанного на предыдущем рисунке, ArrayNormal свойство имеет значение 'x'. Затем boresights элемента указывают вдоль оси X.
| Значение свойства ArrayNormal | Положения элементов и направления бурного визирования |
|---|---|
'x' | Элементы массива лежат на плоскости yz. Векторы визирования элементов указывают вдоль оси X. |
'y' | Элементы массива лежат на плоскости zx. Векторы визирования элементов указывают вдоль оси Y. |
'z' | Элементы массива лежат на плоскости xy. Векторы визирования элементов указывают вдоль оси Z. |
Локальные координаты, адаптированные к однородному прямоугольному массиву
Создайте два примера однородных прямоугольных массивов и отобразите координаты элементов относительно локальных систем координат, определенных массивами.
Сначала создайте URA 2 на 4 с интервалом между элементами в полметра.
sURA = phased.URA('Size',[2 4],'ElementSpacing',[0.5 0.5]); ElementLocs = getElementPosition(sURA)
ElementLocs = 3×8
0 0 0 0 0 0 0 0
-0.7500 -0.7500 -0.2500 -0.2500 0.2500 0.2500 0.7500 0.7500
0.2500 -0.2500 0.2500 -0.2500 0.2500 -0.2500 0.2500 -0.2500
viewArray(sURA)

Фазовый центр массива - это среднее значение положений элементов массива. Начало локальной системы координат массива устанавливается в центр фазы массива.
disp(mean(ElementLocs'))
0 0 0
Поскольку массив имеет четное число элементов в каждой строке и столбце, ни один элемент массива фактически не находится в центре фазы (0,0,0).
Затем создайте URA 5 на 3 с тридцатисантиметровым интервалом между элементами.
sURA1 = phased.URA([5 3],'ElementSpacing',[0.3 0.3]);
ElementLocs = getElementPosition(sURA1)ElementLocs = 3×15
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
-0.3000 -0.3000 -0.3000 -0.3000 -0.3000 0 0 0 0 0 0.3000 0.3000 0.3000 0.3000 0.3000
0.6000 0.3000 0 -0.3000 -0.6000 0.6000 0.3000 0 -0.3000 -0.6000 0.6000 0.3000 0 -0.3000 -0.6000
viewArray(sURA1)

Поскольку массив имеет нечетное количество элементов в каждой строке и столбце, центральный элемент массива находится в центре фазы.
Сигнал поступает в массив из точки в 1000 метрах от вдоль оси + x глобальной системы координат. Локальная матрица URA поворачивается на 30 градусов по часовой стрелке вокруг оси Y. Вычислите угол прихода сигнала по осям локальной матрицы.
laxes = roty(30); [rng,ang] = rangeangle([1000,0,0]',[0,0,0]',laxes)
rng = 1.0000e+03
ang = 2×1
0
30.0000
Начало массива и центр фазы. Однородная круговая решетка (УЦА) - решетка антенных или микрофонных элементов, разнесенных под равными углами по окружности. phased.UCA Системный объект создает особый случай UCA. В этом случае направления визирования элемента указывают от начала координат массива, как спицы колеса. Начало локальной системы координат - это геометрический центр массива. Геометрия УЦА и расположение и ориентация его элементов определяется тремя параметрами: радиусом массива, количеством элементов и ArrayNormal собственность. Элементам автоматически назначаются позиции в локальной системе координат. Позиции определяются ArrayNormal свойство, которое может принимать значения 'x', 'y' или 'z'. Все элементы лежат в плоскости, проходящей через начало координат и перпендикулярной оси, указанной в этом свойстве. Фазовый центр массива совпадает с геометрическим центром. Например, когда ArrayNormal свойство имеет значение 'x'элементы массива лежат в плоскости yz, как показано на рисунке. Можно создать более общий UCA с произвольными направлениями визирования с помощью phased.ConformalArray Системный объект.
На этом рисунке показан 8-элементный УЦА с элементами, расположенными в плоскости yz.
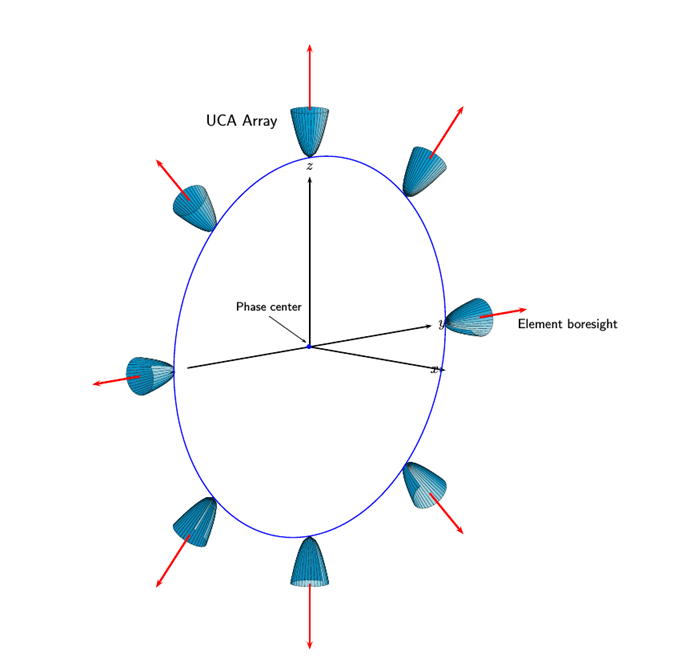
Направления бурного визирования элемента. В УЦА, определяемом phased.UCA Системный объект, направления визирования элемента указывают радиально наружу от начала координат массива. В УЦА, показанном на предыдущем рисунке, потому что ArrayNormal свойство имеет значение 'x'направления визирования элемента направлены радиально наружу в плоскости yz.
| Значение свойства ArrayNormal | Положения элементов и направления бурного визирования |
|---|---|
'x' | Элементы массива лежат на плоскости yz. Все векторы визирования элементов лежат в плоскости yz и направлены радиально наружу от начала координат. |
'y' | Элементы массива лежат на плоскости zx. Все векторы визирования элементов лежат в плоскости zx и направлены радиально наружу от начала координат. |
'z' | Элементы массива лежат на плоскости xy. Все векторы визирования элементов лежат в плоскости xy и направлены радиально наружу от начала координат. |
Начало массива и центр фазы. Вы можете использовать phased.ConformalArray для создания массивов произвольной формы. В отличие от однородных массивов, необходимо явно указывать позиции элементов. Массив N-элементов требует указания N 3-D координат в локальной системе координат массива. Начало координат конформного массива может быть расположено в любой произвольной точке. Направления визирования элементов конформной матрицы не обязательно должны быть параллельными. Азимут и углы отметки, определяющие направления визирования, соответствуют локальной системе координат. Фазовый центр массива не обязательно должен совпадать с геометрическим центром. Те же свойства применяются к phased.HeterogeneousConformalArray массив.
На этом рисунке показаны положения и ориентации 4-элементного конформного массива.
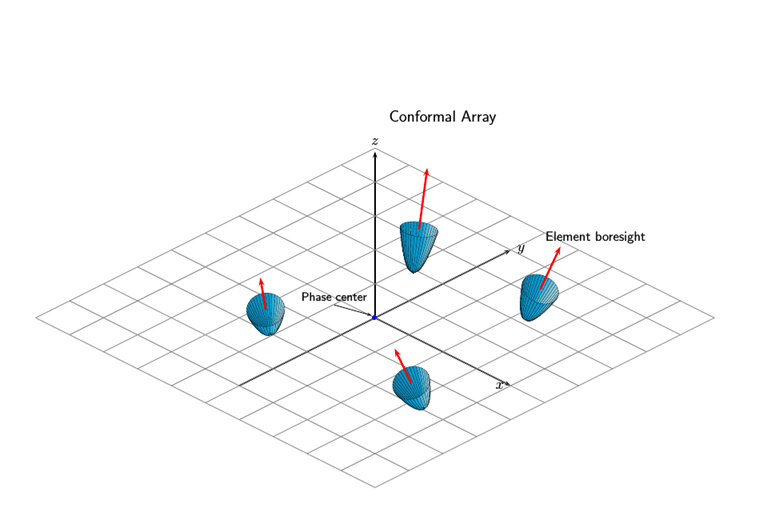
4-Element Конформный массив
Создайте четырехэлементный массив с помощью объекта ConformalArray System. Предположим, что рабочая частота составляет 900 МГц. Отображение геометрии массива и нормальных векторов.
fc = 900e6; c = physconst('LightSpeed'); lam = c/fc; x = [1.0,-.5,0,.8]*lam/2; y = [-.4,-1,.5,1.5]*lam/2; z = [-.3,.3,0.4,0]*lam/2; sIso = phased.CosineAntennaElement(... 'FrequencyRange',[0,1e9]); nv = [-140,-140,90,90;80,80,80,80]; sConformArray = phased.ConformalArray('Element',sIso,... 'ElementPosition',[x;y;z],... 'ElementNormal',nv); pos = getElementPosition(sConformArray)
pos = 3×4
0.1666 -0.0833 0 0.1332
-0.0666 -0.1666 0.0833 0.2498
-0.0500 0.0500 0.0666 0
normvec = getElementNormal(sConformArray)
normvec = 2×4
-140 -140 90 90
80 80 80 80
viewArray(sConformArray,'ShowIndex','All','ShowNormal',true)

Во многих приложениях обработки массивов необходимо выполнять преобразование между глобальными и локальными координатами. Две функции инженерного обеспечения, global2localcoord и local2globalcoord, выполните эти преобразования.
Определите положение цели в прямоугольных координатах в глобальной системе координат. Сначала задайте локальные сферические координаты цели относительно URA. Центр URA определяет начало локальной системы координат. Местоположение цели в локальных сферических координатах - азимут 30 °, отметка 45 ° и дальность 1000 м. Для преобразования в глобальные прямоугольные координаты укажите положение начала локальной системы координат в глобальных координатах. Начало локальной системы координат - (1000 500 100) m от глобального начала координат.
Преобразование координат точки в глобальные прямоугольные координаты. Чтобы преобразовать локальные сферические координаты в глобальные прямоугольные, используйте 'sr' в вызове local2globalcoord функция.
gCoord = local2globalcoord([30; 45; 1000],'sr',[1000; 500; 100])gCoord = 3×1
103 ×
1.6124
0.8536
0.8071
Цель расположена в (1612 854 807) м в глобальной системе координат.
Copyright 2018 The MathWorks, Inc ".
Определите положение цели в локальных сферических координатах, центрированных в фазовом центре массива URA. Центр URA определяет начало локальной системы координат и имеет глобальные прямоугольные координаты (5000,3000,50). Локальными координатными осями URA являются (0,1,0), (1,0,0) и (0,0, -1). Задайте глобальные прямоугольные координаты цели в (1000,500,10).
Преобразование координат цели в локальные сферические прямоугольные координаты. Чтобы преобразовать глобальные прямоугольные координаты в локальные сферические, используйте 'rs' в вызове global2localcoord функция.
lCoord = global2localcoord([5000; 3000; 50],'rs',[1000; 500; 100], ... [0 1 0; 1 0 0; 0 0 -1])
lCoord = 3×1
103 ×
0.0580
0.0006
4.7173
Выход имеет вид (az, el, rng). Цель находится в локальных сферических координатах на азимуте 58 °, отметке 0,6 ° и 4717 м.
