Преобразование локальных в глобальные координаты
gCoord = local2globalcoord(lclCoord,OPTION)
gCoord = local2globalcoord(___,localOrigin)
gCoord = local2globalcoord(___,localAxes)
gCoord = local2globalcoord(lclCoord,OPTION)lclCoord в глобальные координаты gCoord. OPTION определяет тип преобразования локальной в глобальную координату.
gCoord = local2globalcoord(___,localOrigin)localOrigin.
gCoord = local2globalcoord(___,localAxes)localAxes.
|
Локальные координаты в прямоугольной или сферической форме координат, заданные как матрица 3-by-N. Каждый столбец представляет один набор локальных координат. Если координаты имеют прямоугольную форму, каждый столбец содержит компоненты (x, y, z). Единицы в метрах. Если координаты имеют сферическую форму, каждый столбец содержит (az, el, r) компоненты. az - азимутальный угол в градусах, el - угол места в градусах, r - радиус в метрах. | ||||||||||
|
Типы преобразований координат, заданные как символьный вектор. Допустимые значения:
| ||||||||||
|
Начало локальной системы координат, указанное как матрица 3-by-N, содержащая прямоугольные координаты начала локальной системы координат относительно глобальной системы координат. N должно соответствовать количеству столбцов По умолчанию: | ||||||||||
|
Оси локальной системы координат, заданные как массив 3-by-3-by-N. Каждая страница содержит матрицу 3 на 3, представляющую различные оси локальной системы координат. Столбцы матриц 3 на 3 задают локальные оси x, y и z в прямоугольной форме относительно глобальной системы координат. Однако можно указать По умолчанию: |
|
Координаты Глабаля в прямоугольной или сферической форме координат, возвращаемые в виде 3-by-N матрицы. Размеры |
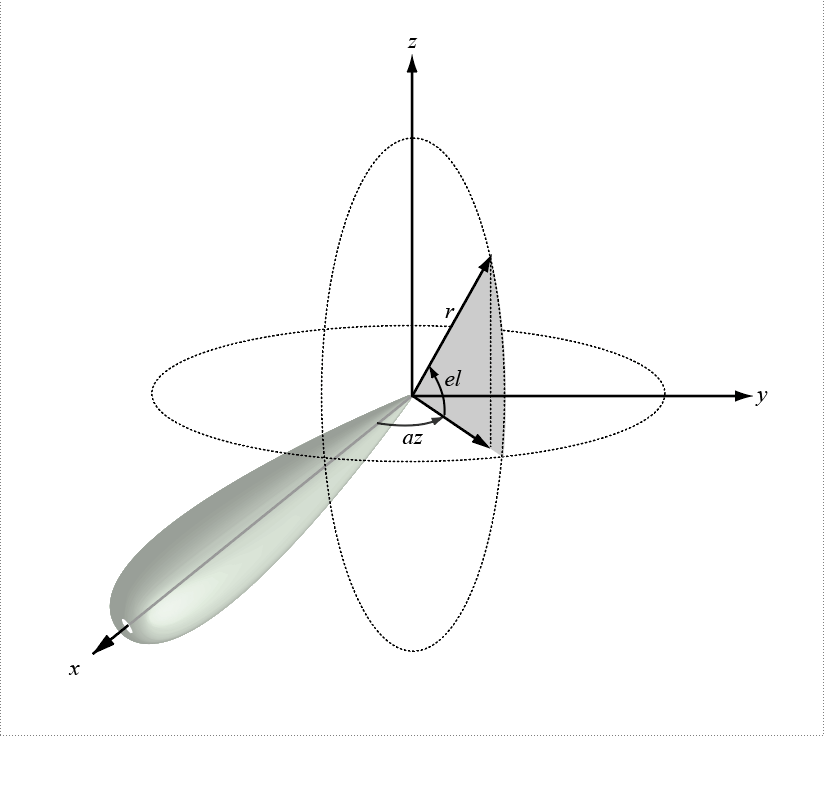
Азимутальный угол вектора - это угол между осью x и ортогональной проекцией вектора на плоскость xy. Угол положителен в направлении от оси x к оси y. Азимутальные углы лежат между -180 и 180 градусами. Угол места - это угол между вектором и его ортогональной проекцией на плоскость xy. При переходе к положительной оси Z от плоскости xy угол является положительным. По умолчанию направление визирования элемента или массива выравнивается по положительной оси X. Направление визирования - это направление главного лепестка элемента или массива.
Примечание
Иногда угол возвышения определяется в литературе как угол вектора с положительной осью z. В продуктах MATLAB ® и Phased Array System Toolbox™ это определение не используется.
На этом рисунке показаны азимут и углы возвышения вектора направления.
[1] Фоли, Дж. Д., А. ван Дам, С. К. Файнер и Дж. Ф. Хьюз. Компьютерная графика: Принципы и практика в C, 2-й ред. Reading, MA: Addison-Wesley, 1995.
azel2phitheta | azel2uv | global2localcoord | phitheta2azel | rangeangle | uv2azel
