Интерфейс между механическими вращательными сетями и соединениями Simscape Multibody
Интерфейс Simscape/Foundation Library/Mechanical/Multibody

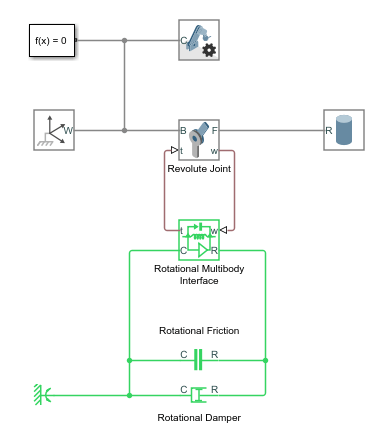
Блок Rotational Multibody Interface реализует интуитивно понятный способ соединения Simscape™ блоков, имеющих механические поворотные порты, с соединениями Simscape Multibody™, имеющими поворотные примитивы. Блоки Simscape, которые могут быть подключены к блоку вращательного мультибиблиотечного интерфейса, включают в себя:
Блоки из библиотеки «Фундамент» > «Mechanical» > «Вращательные элементы», такие как «Вращательное трение» или «Вращательный демпфер».
Блоки с механическими вращательными портами из других библиотек Foundation, таких как вращательный механический преобразователь (G) или вращательный механический преобразователь (IL).
Блоки с механическими вращательными портами из дополнительных продуктов, таких как гидравлические приводы из библиотек Simscape Fluids™.
Блок вращательного многофюзеляжного интерфейса соответствует крутящему моменту и относительной угловой скорости через интерфейс. Его можно подключить к любому соединению Simscape Multibody, имеющему виражный примитив:
Включите порт w измерения скорости и порт t приведения в действие крутящего момента на соединении. Если соединение имеет несколько степеней свободы, убедитесь, что выбранные датчик скорости и включение крутящего момента соответствуют одной и той же степени свободы.
Подключите порты физических сигналов w и t блока вращательного мультибелкового интерфейса к портам w и t соединения Simscape Multibody.
Подключите порты C и R блока вращательного мультибортового интерфейса к механической вращательной сети Simscape.
Подробные пошаговые инструкции см. в разделе Подключение сетей Simscape к множественным соединениям Simscape.
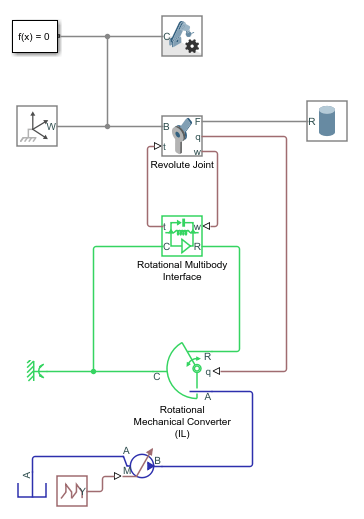
Блоки типа вращательного трения и вращательного демпфера не требуют информации о положении, и для этих блоков достаточно интерфейса, основанного на крутящем моменте и относительной угловой скорости. Другие блоки, такие как гидравлические приводы, требуют информации об относительном положении между их окнами. Чтобы подключить эти блоки к соединению Simscape Multibody, выполните следующие действия.
Используйте блок «Вращательный мультибелочный интерфейс». Включите порт w измерения скорости и порт t приведения в действие крутящего момента на соединении и подключите порты, как описано выше.
Кроме того, включите порт q определения положения на соединении. Если соединение имеет несколько степеней свободы, убедитесь, что все датчики положения и скорости и крутящий момент соответствуют одной и той же степени свободы.
В блоке привода включите порт ввода положения q, установив для параметра Interface rotation значение Provide input signal from Multibody joint. Подключите порт q ввода положения на блоке привода к порту q определения положения соединения Simscape Multibody.
Для моделей с блоками Translational Multibody Interface или Rotational Multiobody Interface рекомендуется использовать блоки Simscape Multibody для моделирования масс и инерций. Причина в том, что сети Simscape должны иметь наземный (опорный) узел, при этом все массы и инерции в сети ускоряются относительно этого узла. В соединении Simscape Multibody как базовая, так и ведомая рамы могут ускоряться. Поэтому масса или инерция в сети Simscape, соединенной с соединением, может не иметь правильной инерционной привязки.

