Вы можете смоделировать 3D механические системы при помощи блоков Simscape™ Multibody™, представляющих тела, суставы, ограничения, элементы силы и датчики. Эти модели могут также включать сети Simscape, представляющие гидравлические, электрические, пневматические и другие физические системы. Примерами многооменных моделей, требующих соединений между сетями Simscape и блоками Simscape Multibody, являются:
Механическая система, состоящая из блоков Simscape Multibody, которая питается от гидравлической системы и поэтому должна взаимодействовать с гидравлическими приводами из библиотек Simscape Fluids™
Электрическая цепь Simscape с двигателем, в которой двигатель используется для приведения в действие многозвенного соединения Simscape
Моделирование нелинейных пружин, демпферов, трения для соединений Simscape Multibody
Сети Simscape одномерны, в то время как Simscape Multibody предоставляет 3-D возможности моделирования. Поэтому нельзя напрямую подключить механические вращательные и поступательные порты Simscape к блокам Simscape Multibody. Необходимо установить двунаправленные соединения между частями блок-схемы Simscape и соединениями Simscape Multibody, которые включают как восприятие, так и срабатывание, и в некоторых случаях также должны передавать информацию о положении:
Сила и относительная скорость должны быть равны по отношению к поступательному интерфейсу. Чтобы сделать соединение более прочным, измерьте скорость соединения и обеспечьте силовое срабатывание соединения.
Крутящий момент и относительная угловая скорость должны быть равны по поверхности раздела вращения. Чтобы сделать соединение более прочным, измерьте угловую скорость соединения и обеспечьте включение крутящего момента соединения.
Соединения Simscape Multibody содержат информацию о положении, в то время как механические соединения Simscape учитывают только относительную скорость. Некоторые блоки Simscape зависят только от скорости, но некоторые блоки Simscape зависят от скорости и положения. Если поведение блока Simscape зависит от положения или угла, его положение или угол должны быть равны положению или углу соединенного соединения Simscape Multibody как во время инициализации, так и во время моделирования.
В любое время, когда требуется подключить сеть Simscape к соединению Simscape Multibody, используйте блок Translational Multibody Interface или Rotational Multiobody Interface и следуйте инструкциям в разделе Как использовать блоки интерфейса. Если сеть Simscape содержит блоки, зависящие от положения или угла, выполните дополнительные действия в разделе Как передать информацию о положении.
Блоки Translational Multibody Interface и Rotational Multibody Interface помогают соединить части блок-схемы Simscape с соединениями Simscape Multibody:
Блок Translational Multibody Interface соответствует силе и относительной скорости через интерфейс. Его можно подключить к любому соединению Simscape Multibody, имеющему призматический примитив. Блок Translational Multibody Interface имеет два механических поступательных порта C и R для подключения к сети Simscape и два физических сигнальных порта f и v, которые соединяются с соответствующими портами включения и считывания соединения Simscape Multibody.
Блок вращательного многофюзеляжного интерфейса соответствует крутящему моменту и относительной угловой скорости через интерфейс. Его можно подключить к любому соединению Simscape Multibody, имеющему виражный примитив. Блок интерфейса вращательного тела имеет два механических поворотных порта C и R для подключения к сети Simscape и два физических сигнальных порта t и w для подключения к соответствующим портам включения и считывания соединения Simscape Multibody.
На этой блок-схеме показана механическая поступательная сеть Simscape, содержащая блоки поступательного трения и поступательного демпфера. Эта сеть подключена к блоку Simscape Multisbody Prismatic Joint с помощью блока Translational Multibody Interface.
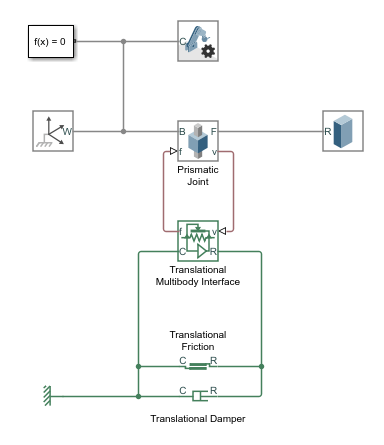
Для использования блока Translational Multibody Interface:
В блоке Призматическое соединение (Prismatic Joint) задайте опции включения и считывания для примитива призматического соединения:
В разделе Приведение в действие (Activation) установите значение Сила (Force) Provided by Input, для включения порта f приведения в действие усилия.
В разделе Sensing (Измерение скорости) выберите Velocity (Скорость), чтобы включить порт v.
Если соединение имеет несколько степеней свободы, убедитесь, что выбранные опции включения и измерения соответствуют одной и той же степени свободы.
Подключите порты физических сигналов f и v блока трансляционного мультибелевого интерфейса к портам f и v блока призматического соединения.
Подключите порты C и R блока Translational Multibody Interface к механической трансляционной сети Simscape. В этом примере соедините порты C и R блоков поступательного трения и поступательного демпфера с соответствующими портами блока поступательного многофюзеляжного интерфейса.
Такие блоки, как поступательное трение и поступательное демпфер, не требуют информации о положении, и для этих блоков достаточно интерфейса, основанного на силе и относительной скорости. Другие блоки, такие как гидравлические приводы, требуют информации об относительном положении или относительном угле между их окнами.
Чтобы подключить эти блоки к соединению Simscape Multibody, выполните следующие действия.
Для подключения сети Simscape к соединению используйте блок «Трансляционный многофакторный интерфейс» или «Вращательный многофакторный интерфейс». Включите порты включения и измерения скорости на соединении и подключите порты, как описано в разделе Использование интерфейсных блоков.
Кроме того, включите порт p определения положения (или, для степеней свободы вращения, порт q) на соединении. Если соединение имеет несколько степеней свободы, убедитесь в том, что измерение положения соответствует той же степени свободы, что и варианты измерения срабатывания и скорости, выбранные на этапе 1.
В блоке привода включите порт p ввода положения (или, для приводов вращения, порт q), установив для параметра Interface displacement (или Interface rotation) значение Provide input signal from Multibody joint. Подключите входной порт блока привода к соответствующему сенсорному порту соединения Simscape Multibody.
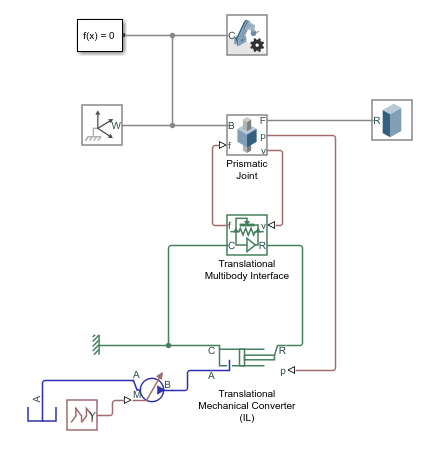
Например, чтобы подключить блок поступательного механического преобразователя (IL) к блоку призматического соединения, как показано на блок-схеме:
В блоке Призматическое соединение (Prismatic Joint) задайте опции включения и считывания для примитива призматического соединения:
В разделе Приведение в действие (Activation) установите значение Сила (Force) Provided by Input, для включения порта f приведения в действие усилия.
В разделе Sensing (Измерение скорости) выберите Velocity (Скорость), чтобы включить порт v.
В поле Sensing (Определение положения) выберите Position (Положение), чтобы включить порт p определения положения.
Если соединение имеет несколько степеней свободы, убедитесь, что выбранные опции включения и измерения соответствуют одной и той же степени свободы.
Подключите порты физических сигналов f и v блока трансляционного мультибелевого интерфейса к портам f и v блока призматического соединения.
Подключите порты C и R блока Translational Multibody Interface к портам C и R блока Translational Mechanical Converter (IL).
В блоке Translational Mechanical Converter (IL) задайте для параметра Interface displacement значение Provide input signal from Multibody joint, для включения порта p ввода физического сигнала.
Подключите порт p определения положения соединения к входному порту p физического сигнала блока поступательного механического преобразователя (IL).
Подробный пример передачи информации о положении из мультибортового соединения в гидравлические приводы с учетом различной механической ориентации приводов см. в разделе Моделирование привода двойного действия.
Для моделей с блоками Translational Multibody Interface или Rotational Multiobody Interface рекомендуется использовать блоки Simscape Multibody для моделирования масс и инерций. Причина в том, что сети Simscape должны иметь наземный (опорный) узел, при этом все массы и инерции в сети ускоряются относительно этого узла. В соединении Simscape Multibody как базовая, так и ведомая рамы могут ускоряться. Поэтому масса или инерция в сети Simscape, соединенной с соединением, может не иметь правильной инерционной привязки.
Вращательный многоборцевый интерфейс | Трансляционный мультибиблиотечный интерфейс
