В этом примере показано, как можно регистрировать и выводить на печать расчетные данные вместо добавления датчиков в модель.
Показанная модель представляет двигатель постоянного тока с постоянным магнитом.
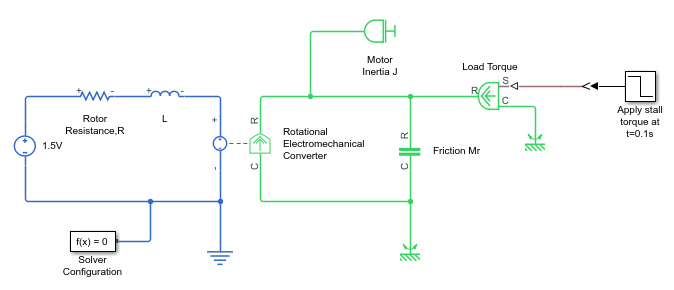
Эта модель очень похожа на пример двигателя постоянного тока постоянного магнита, но, в отличие от модели примера, она не включает сенсорный блок w (идеальный датчик вращательного движения и блок PS-Simulink Converter) вместе с объемом измерения частоты вращения двигателя. Подробное описание примера двигателя постоянного тока с постоянным магнитом см. в разделе Оценка рабочих характеристик двигателя постоянного тока.
Создайте модель, как показано на предыдущей иллюстрации.
В окне модели откройте вкладку Моделирование (Modeling) и щелкните Настройки модели (Model Settings). Откроется диалоговое окно Параметры конфигурации (Configuration Parameters).
В диалоговом окне «Параметры конфигурации» на левой панели выберите Импорт/экспорт данных. Снимите флажок Вывод одного моделирования (Single simulation output), который установлен по умолчанию. Этот шаг позволяет связать записанные данные моделирования с отдельной переменной рабочей области, а не с одним выходным объектом.
Чтобы включить ведение журнала данных, в диалоговом окне «Параметры конфигурации» на левой панели выберите Simscape, а затем задайте для параметра Данные моделирования журнала значение All и нажмите кнопку ОК.
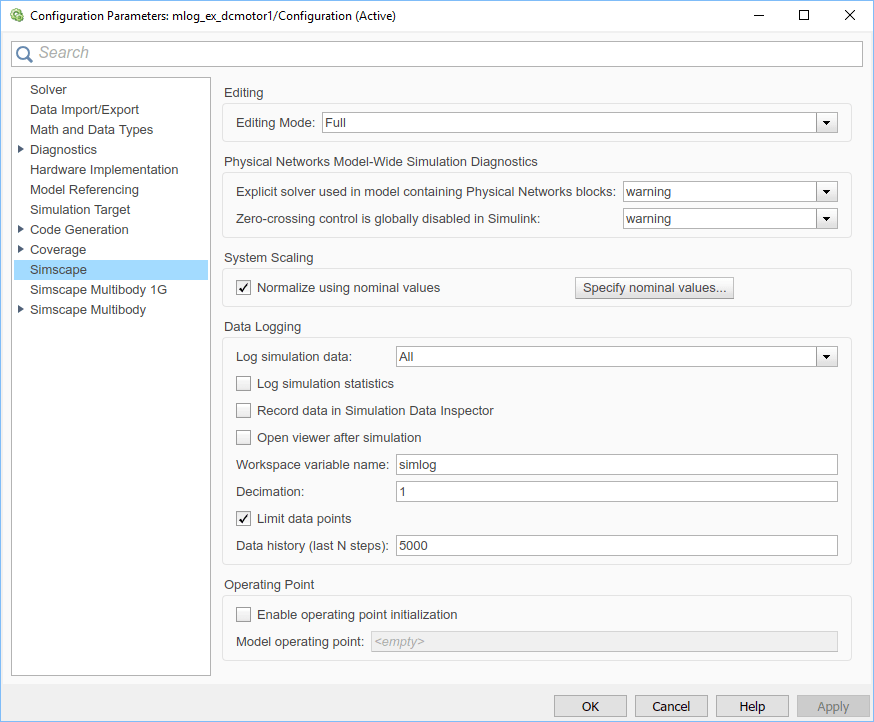
Моделирование модели. Создается переменная рабочего пространства с именем simlog (как указано параметром Имя переменной рабочей области), который содержит данные моделирования.
simlog переменная имеет ту же иерархию, что и модель. Для просмотра всей структуры переменных в командной строке введите:
print(simlog)
Эта команда используется для печати всего дерева данных.
mlog_ex_dcmotor1
+-Electrical_Reference2
| +-V
| +-v
+-Friction_Mr
| +-C
| | +-w
| +-R
| | +-w
| +-t
| +-w
+-L
| +-i
| +-i_L
| +-n
| | +-v
| +-p
| | +-v
| +-v
+-Load_Torque
| +-C
| | +-w
| +-R
| | +-w
| +-S
| +-t
| +-w
+-Mechanical_Rotational_Reference
| +-W
| +-w
+-Mechanical_Rotational_Reference1
| +-W
| +-w
+-Motor_Inertia_J
| +-I
| | +-w
| +-t
| +-w
+-Rotational_Electromechanical_Converter
| +-C
| | +-w
| +-R
| | +-w
| +-i
| +-n
| | +-v
| +-p
| | +-v
| +-t
| +-v
| +-w
+-Rotor_ResistanceR
| +-i
| +-n
| | +-v
| +-p
| | +-v
| +-v
+-x1_5V
+-i
+-n
| +-v
+-p
| +-v
+-vКаждый узел, представляющий переменную Across, Through или внутренний блок, содержит данные серии. Чтобы перейти к серии, необходимо указать полный путь к ней через дерево, начиная с имени переменной верхнего уровня. Например, чтобы получить ручку на последовательности, представляющей угловую скорость двигателя, введите:
s1 = simlog.Rotational_Electromechanical_Converter.R.w.series;
Отсюда можно получить доступ к значениям и векторам времени для ряда и проанализировать их.
Нет необходимости изолировать данные серии для печати их значений по времени или по другим сериям. Например, чтобы увидеть, как скорость двигателя (в оборотах в минуту) изменяется со временем, введите:
plot(simlog.Rotational_Electromechanical_Converter.R.w,'units','rpm')
Сравните этот рисунок с отображением области RPM в примере двигателя постоянного тока с постоянным магнитом. Результаты точно такие же.
Для построения графика крутящего момента двигателя относительно его угловой скорости, в rpmи добавьте описательные имена осей, введите:
plotxy(simlog.Rotational_Electromechanical_Converter.R.w,simlog.Motor_Inertia_J.t,... 'xunit','rpm','xname','Angular velocity','yname','Torque')
Дополнительные сведения о выводе на печать записанных данных моделирования см. в разделе simscape.logging.plot и simscape.logging.plotxy справочные страницы.
