Вы можете сделать свою модель способной в реальном времени, выявляя и уменьшая источники быстрой или высокочастотной динамики. Модель с поддержкой реального времени - это модель, которая дает приемлемые результаты на машине реального времени без создания перерасходов. В примере показано, как определить быструю динамику путем анализа частотной характеристики и положения полюсов линеаризованной модели. Также показано, как выявлять и удалять источники быстрой динамики.
Модели с быстрой динамикой обычно имеют высокую вычислительную стоимость. Удаление быстрой динамики уменьшает вычислительные затраты и увеличивает минимальный размер шага, который можно задать для моделирования фиксированного шага. Использование большего размера шага увеличивает вероятность того, что модель способна работать в режиме реального времени.
Частотный отклик описывает стационарный отклик системы на синусоидальные входы. Для линейной системы синусоидальный вход приводит к выходу, который представляет собой синусоиду с той же самой частотой, λ, но с другой амплитудой и фазой.
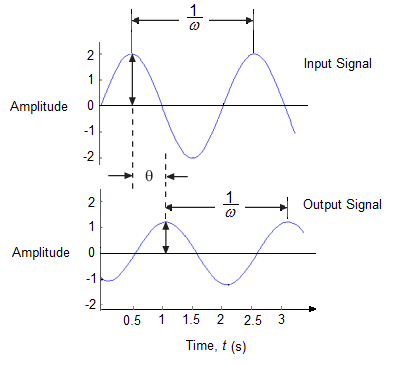
Частотный анализ показывает, как изменяются амплитуда и фаза в заданном диапазоне частот. Для небольшого изменения частоты большая величина или фазовое изменение указывает на то, что система имеет быструю динамику. В этом примере используются графики Боде, которые позволяют видеть, как амплитуда, в терминах величины в дБ, и фаза изменяются в зависимости от частоты.
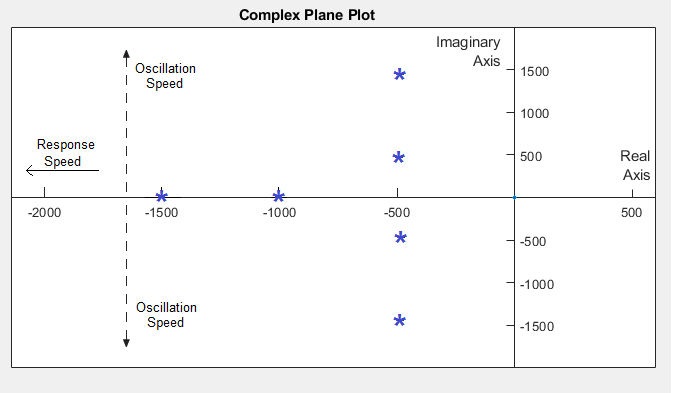
Быстрые полюса также указывают на быструю динамику. Быстрые полюса - это полюса, которые быстро реагируют или колеблются. Полюса, имеющие реальные компоненты, которые находятся далеко слева от воображаемой оси на комплексной плоскости, имеют быструю скорость отклика. Сложные пары полюсов, имеющие воображаемые компоненты, которые находятся далеко от реальной оси, быстро колеблются. Например, реальный полюс в -1500 имеет более высокую скорость отклика, чем реальный полюс в -1000, а комплексная пара полюсов в -500 ± 1500i имеет более высокую скорость колебания, чем комплексная пара полюсов в -500 ± 500i.
Для моделей с пространством состояний полюса являются собственными значениями матрицы A. В этом примере показано, как исследовать скорость полюсов путем определения модели «состояние-пространство», а затем вычисления и печати собственных значений значений матрицы A.
Модель в этом примере не является линейной. Перед выполнением частотно-ответного и полюсного анализа выполните обрезку, которая является извлечением, и укажите рабочие точки для линеаризации, а также линеаризацию модели.
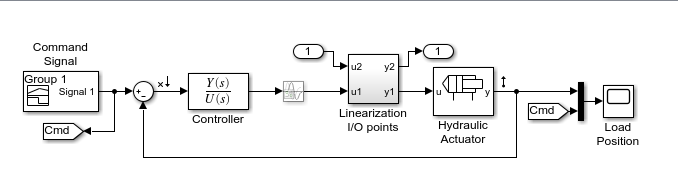
Откройте и изучите модель. В командной строке MATLAB ® введите:
%% Open the model open_system('ssc_hydraulic_actuator_digital_control')
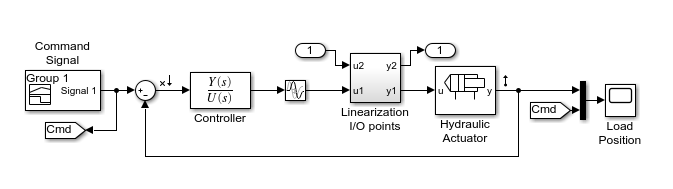
В дополнение к блокам генерации, эксплуатации, маршрутизации и визуализации, модель содержит следующие блоки:
Контроллер - блок передачи Fcn, который определяет непрерывное представление времени системы управления. Функция обратного вызова для модели сохраняет числитель, число и знаменатель, den, передаточной функции в качестве переменных в рабочей области.
![]() - Блок задержки передачи для представления задержек, связанных с задержкой вычислений, и функции выборки и удержания при развертывании дискретной реализации системы непрерывного управления временем.
- Блок задержки передачи для представления задержек, связанных с задержкой вычислений, и функции выборки и удержания при развертывании дискретной реализации системы непрерывного управления временем.
Точки ввода/вывода линеаризации - подсистема, позволяющая настраивать систему как замкнутый контур, для обрезки или как разомкнутый контур, для линеаризации. Функция обратного вызова для модели конфигурирует систему как замкнутый контур путем установки для параметра «CallingLoop» значения 1 в рабочей области.
Гидравлический привод - подсистема, содержащая физическую модель установки.
Найдите подходящую рабочую точку для линеаризации системы. Смоделировать модель, извлечь данные из узлов регистрации Simscape™, а затем построить график и проверить результаты.
![]() Сценарий для моделирования модели и печати результатов
Сценарий для моделирования модели и печати результатов
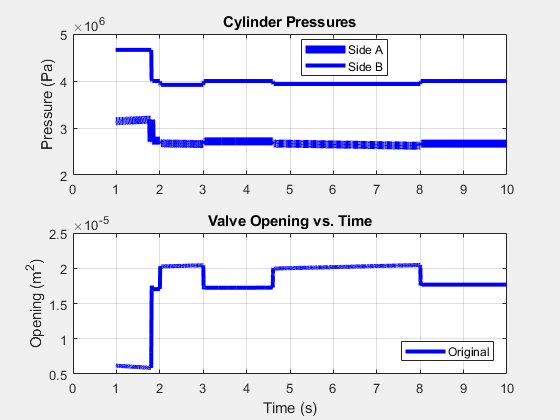
Пользовательский двухходовой клапан открыт, когда время моделирования t составляет 2-3 секунды.
Обрезать модель. Выполните моделирование по замкнутому контуру, используя t = 2,5 секунды, когда клапан открыт, для рабочей точки.
Линеаризация конфигурации с разомкнутым контуром модели непрерывного времени и сохранение переменных состояния a, b, c и d в рабочей области с помощью linmod функция.
Создайте график Бода.
![]() Сценарий для создания графика мода
Сценарий для создания графика мода
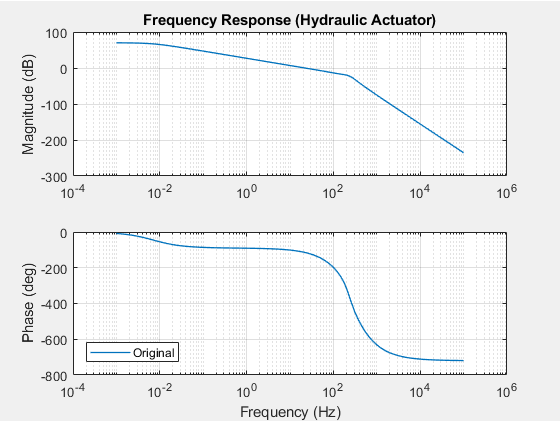
Когда частота λ находится между 102 и 103 Гц, фаза падает приблизительно на 600 градусов. Быстрое изменение в изменении фазы, θ, указывает, что у системы есть быстрая динамика.
Вычислите собственные значения матрицы, используя eig и постройте график полюсов в комплексной плоскости.
![]() Сценарий для вычисления и печати собственных значений матрицы A
Сценарий для вычисления и печати собственных значений матрицы A
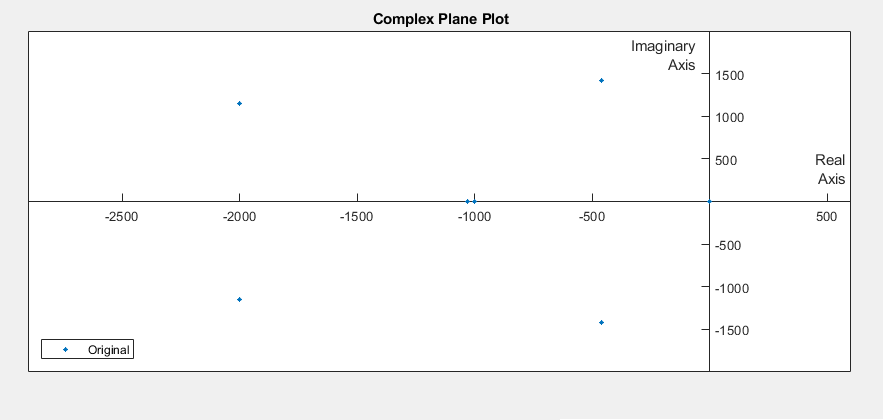
Имеется шесть быстрых полюсов, в том числе две потенциальные осциллирующие пары полюсов.
Подтвердите наличие пар полюсов. Распечатайте значения шести быстрых полюсов в окне команд с помощью eigs функция.
![]() Сценарий печати значений полюсов
Сценарий печати значений полюсов
ans = 1.0e+03 * -2.0000 + 1.1547i -2.0000 - 1.1547i -0.4614 + 1.4208i -0.4614 - 1.4208i -1.0314 + 0.0000i -1.0000 + 0.0000i
Существует два набора пар полюсов.
Изучите модель на предмет потенциальных источников быстрой динамики.
Для линеаризации модели в этом примере используется linmod функция. Документация для linmod советует не использовать функцию для линеаризации модели, содержащей блок задержки переноса. Документация для блока «Задержка переноса» указывает, что аппроксимация Pade для подпрограммы линеаризации может добавлять динамические состояния в модель. Определите, является ли блок источником быстрых полюсов, которые приводят к линеаризации модели.
Чтобы смоделировать модель без влияния блока Задержка переноса (Transport Delay), прокомментируйте этот блок.
![]() Сценарий для комментирования блока задержки передачи
Сценарий для комментирования блока задержки передачи
Значок задержки транспортировки замирает, указывая, что она прокомментирована.
Чтобы проверить частотную характеристику модели без влияния блока Задержка переноса (Transport Delay), обрезать, линеаризовать и смоделировать модель, а затем обновить график Боде (Bode).
![]() Сценарий для обрезки и линеаризации модели и обновления графика мода
Сценарий для обрезки и линеаризации модели и обновления графика мода
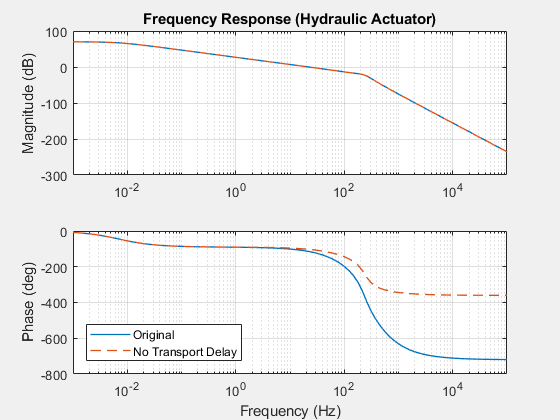
Когда частота, λ, находится между 102 и 103 Гц, фаза падает только на ~ 250 градусов.
Вычислите и постройте график быстрых полюсов.
![]() Сценарий для вычисления и печати собственных значений матрицы A
Сценарий для вычисления и печати собственных значений матрицы A
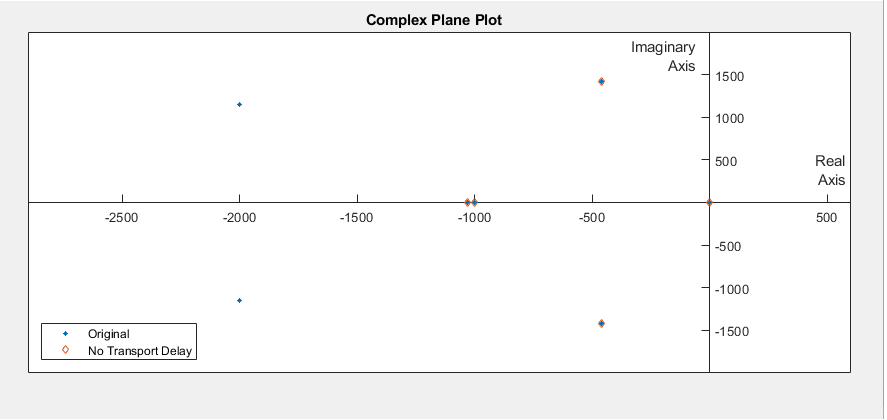
Блок задержки транспортировки отвечает за недостающую пару колебательных полюсов со скоростью -2000 ± 1.1547i рад/с
Постройте график результатов моделирования, чтобы увидеть, соответствуют ли они исходным результатам.
![]() Сценарий для моделирования модели и печати результатов
Сценарий для моделирования модели и печати результатов
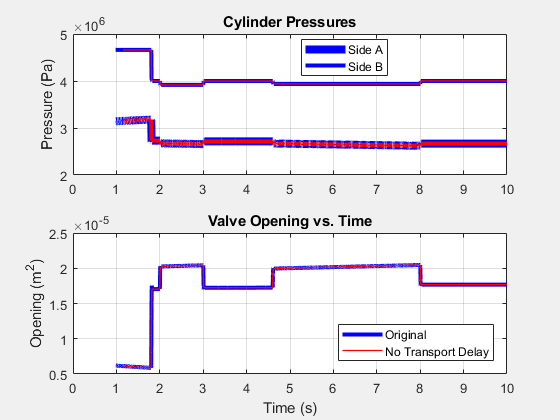
Результаты выглядят похожими.
Увеличьте изображение, чтобы оценить точность более подробно.
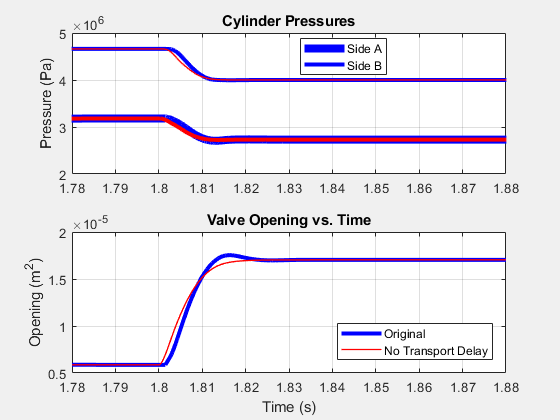
На этом уровне можно увидеть небольшую разницу в результатах для измененной модели. Однако моделирование является достаточно точным, чтобы результаты соответствовали ожиданиям, основанным на эмпирических и теоретических данных.
Модель включает в себя гидравлическую сжимаемость, то есть резонанс нефтяной колонны. Чтобы подтвердить, что резонанс столбца отвечает за вторую пару колебательных полюсов, отключите сжимаемость и повторите частотную характеристику и анализ полюсов.
![]() Сценарий устранения сжимаемости и выполнения частотного отклика и анализа полюсов
Сценарий устранения сжимаемости и выполнения частотного отклика и анализа полюсов
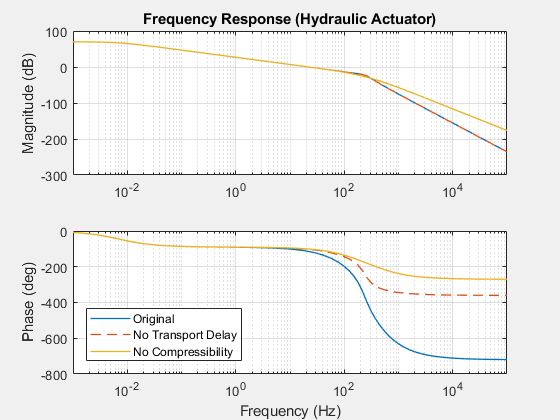
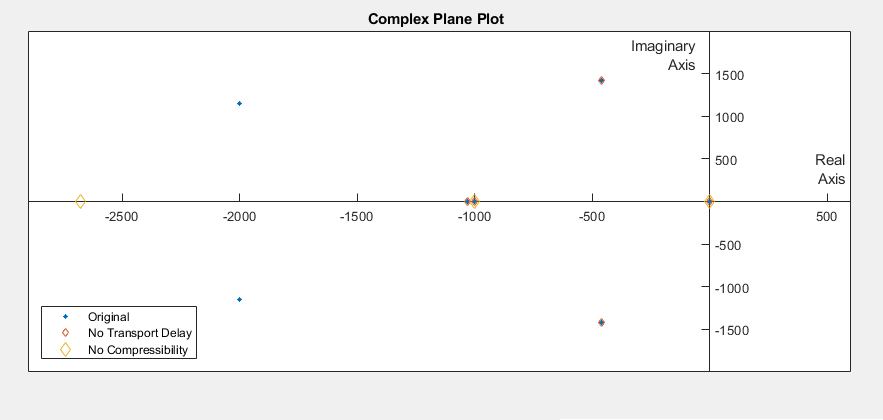
Дальнейшее снижение фазового падения отражает снижение высокочастотной динамики. Теперь есть два быстрых полюса. Несмотря на то, что один из быстрых полюсов переместился дальше от воображаемой оси, существует меньше быстрой динамики, потому что устраняется колеблющаяся пара полюсов со скоростью 458,8 ± 1,4273i рад/сек.
Распечатайте значения оставшихся двух быстрых полюсов в окне команд.
![]() Сценарий печати значений полюсов
Сценарий печати значений полюсов
two_fast_poles = 1.0e+03 * -2.6767 -1.0000
Быстрый полюс при -2677 рад/с соответствует массе нагрузки и гидравлическому демпфированию, введенному двумя компонентами диафрагмы в гидравлической подсистеме. Эта динамика имеет центральное значение для результатов моделирования. Быстрый полюс при -1000 рад/с соответствует знаменателю контроллера, 0,001 с + 1. Передаточная функция является неотъемлемой частью конструкции контроллера. Никакие более динамические режимы не могут быть удалены без изменения важного поведения на уровне системы.
Постройте график результатов моделирования, чтобы увидеть, соответствуют ли они исходным результатам.
![]() Сценарий для печати результатов моделирования
Сценарий для печати результатов моделирования
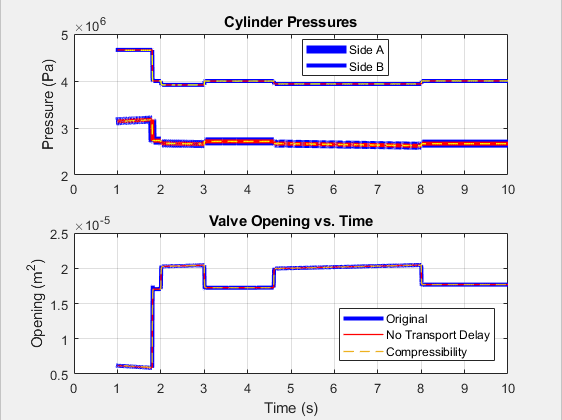
Точность обновленной модели представляется приемлемой.
Увеличьте изображение, чтобы оценить точность более подробно.
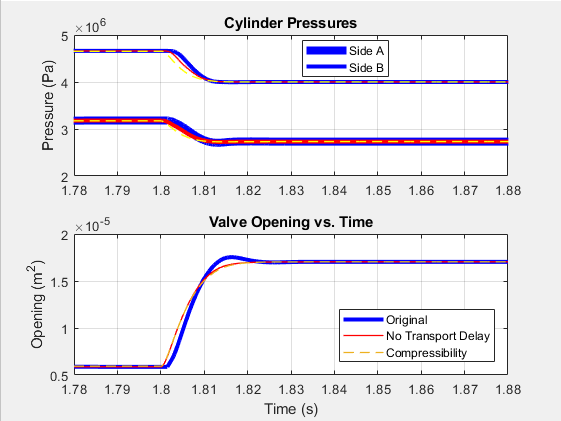
На этом уровне можно увидеть лишь небольшое дополнительное различие в результатах для измененной модели. Точность моделирования является приемлемой.
