В этом учебном пособии рассматриваются различные силы и моменты, которые можно добавить в модель. Затем с помощью блоков с возможностью измерения движения выполняется анализ результирующей динамической характеристики модели. Конечным результатом является набор графиков временной области и фазы, по одному для каждой комбинации сил и моментов. Эти графики создаются с помощью команд MATLAB ® с выводом Simscape™ Multibody™ motion в качестве аргументов.
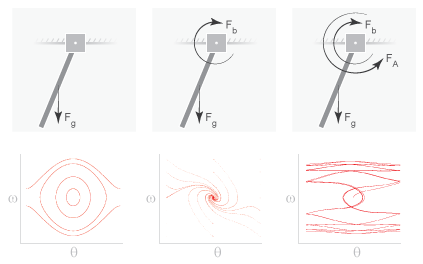
Отправной точкой является простая модель маятника, построенная в модуле «Модель простого маятника». Добавляя силы и моменты к этой модели, вы постепенно меняете маятник с незакрепленного и свободного на демпфированный и ведомый. Силы и моменты, которые вы применяете, включают в себя:
Гравитационная сила (Fg) - глобальная сила, действующая на каждое тело прямо пропорционально его массе, которая задается в терминах вектора ускорения g. Этот вектор задается с помощью блока «Конфигурация механизма».
Демпфирование соединения (Fb) - внутренний крутящий момент между маятником и соединительным приспособлением, который параметризуется в терминах коэффициента линейного демпфирования. Этот параметр задается с помощью блока «Поворотное соединение», соединяющего маятник с соединительным приспособлением.
Крутящий момент срабатывания (FA) - крутящий момент привода между маятником и соединительным приспособлением, который вы назначаете непосредственно как физический сигнал Simscape. Вы назначаете этот сигнал с помощью блока поворотного соединения, который соединяет маятник с соединительным приспособлением.
Откройте модель simple_pendulum, созданную в учебном пособии «Модель простого маятника».
В меню Датчик (Sensing) диалогового окна Поворотное соединение (Revolute Joint) выберите следующие переменные:
Положение
Скорость
Блок открывает два дополнительных физических сигнальных порта, обозначенных q и w, которые выдают угловое положение и скорость маятника относительно мирового кадра.
Добавьте в модель следующие блоки. Они используются здесь для вывода положения соединения и скорости в базовое рабочее пространство MATLAB.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape > Утилиты | Преобразователь PS-Simulink | 2 |
| Simulink > Раковины | К рабочему пространству | 2 |
Измените параметры имени переменной в диалоговых окнах блока «В рабочее пространство» на q и w. Эти переменные упрощают определение переменных соединения, которые блоки To Workspace выводят во время моделирования - положение через порт q блока Revolute Joint и скорость через порт w блока Revolute Joint.
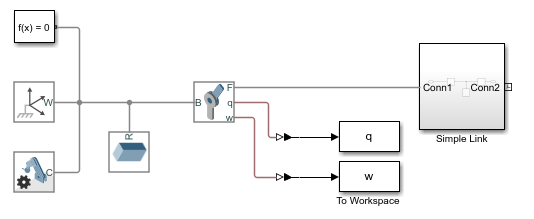
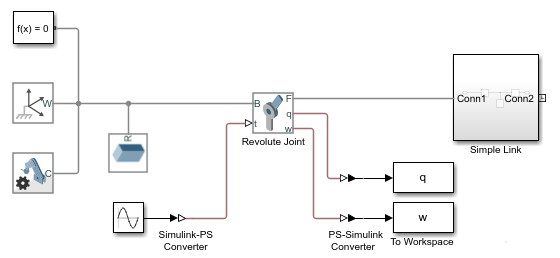
Подключите блоки, как показано на рисунке. Убедитесь, что блок «В рабочую область» имеет имя переменной q подключается через блок PS-Simulink Converter к порту q блока вращательного соединения и что блок To Workspace с именем переменной w подключается к порту блока поворотного соединения w.
Сохраните модель под другим именем, например, simple_pendulum_analysis, в удобной папке.
Запустите моделирование. Mechanics Explorer откроется с 3-D анимацией простой модели маятника.
Постройте график положения соединения и скорости относительно времени, например, введя следующий код в командной строке MATLAB:
figure; % Open a new figure hold on; plot(q); % Plot the pendulum angle plot(w); % Plot the pendulum angular velocity
Постройте график угловой скорости соединения относительно углового положения, например, введя следующий код в командной строке MATLAB.
figure; plot(q.data, w.data);
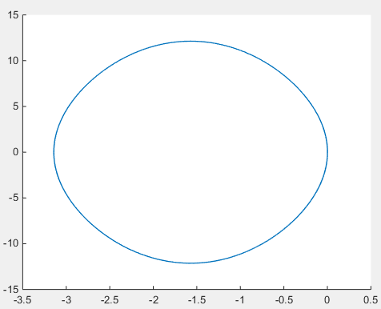
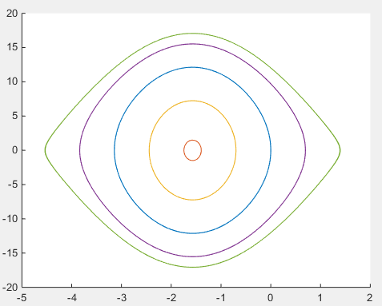
Попробуйте смоделировать модель, используя различные начальные углы. Начальный угол можно изменить в меню «Цели состояния» > «Положение» диалогового окна «Вращение блока соединения». На рисунке показан график составной фазы для начальных углов -80, -40, 0, 40 и 80 градусов.
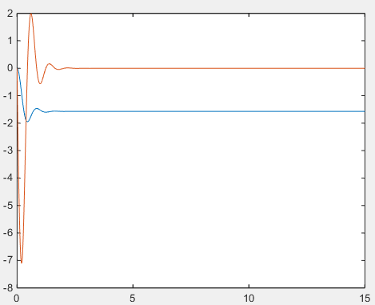
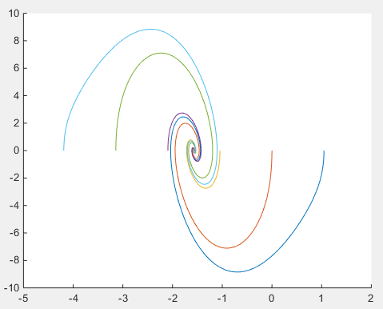
В диалоговом окне Блок вращательного соединения (Revolute Joint block) задайте для параметра Внутренняя механика (Internal Mechanics) > Демпфирование (Damping) значение 8e-5 (N * m )/( град ./с). Коэффициент демпфирования вызывает рассеивание энергии во время движения, что приводит к постепенному затуханию амплитуды маятниковых колебаний.
Убедитесь, что для параметра «Цели состояния» > «Позиция» > «Значение» установлено значение 0 град.
Запустите моделирование.
Постройте график положения соединения и скорости относительно времени. Для этого в командной строке MATLAB можно ввести следующий код:
figure; hold on; plot(q); plot(w);
Постройте график фазы соединения. Для этого в командной строке MATLAB можно ввести следующий код:
figure; plot(q.data, w.data);
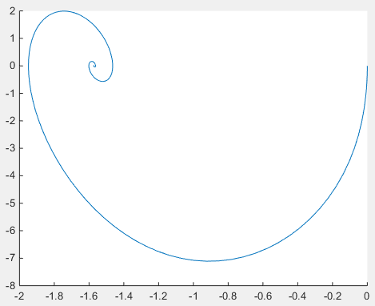
Попробуйте смоделировать модель, используя различные начальные углы. Начальный угол можно изменить в меню «Цели состояния» > «Положение» диалогового окна «Вращение блока соединения». На рисунке показан график составной фазы для начальных углов -240, -180, -120, -60, 0 и 60 градусов.
В диалоговом окне «Вращение блока соединения» установите для параметра «Включение» > «Крутящий момент» значение Provided by Input. Блок открывает порт ввода физического сигнала, который можно использовать для задания крутящего момента срабатывания соединения.
Добавьте эти блоки в модель.
| Библиотека | Блок |
|---|---|
| Simscape > Утилиты | Конвертер Simulink-PS |
| Simulink > Источники | Синусоидальная волна |
Блок синусоидальной волны обеспечивает периодический ввод крутящего момента в качестве сигнала Simulink ®. Блок преобразователя Simulink-PS преобразует сигнал Simulink в физический сигнал Simscape, совместимый с блоками Simscape Multibody.
Подключите блоки, как показано на рисунке.
В диалоговом окне «Синусоидальный блок» задайте для параметра «Амплитуда» значение 0.06. Эта амплитуда соответствует крутящему моменту срабатывания, колеблющемуся между -0,06 Н и 0,06 Н.
В диалоговом окне «Вращение блока соединения» убедитесь, что для параметра «Цели состояния» > «Положение» > «Значение» установлено значение 0 град.
Запустите моделирование.
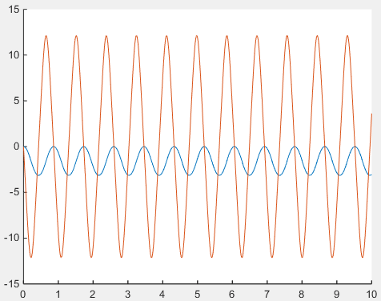
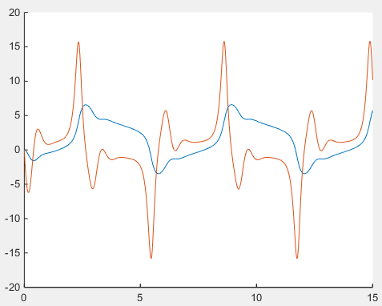
Постройте график положения соединения и скорости относительно времени. Для этого в командной строке MATLAB можно ввести следующий код:
figure; hold on; plot(q); plot(w);
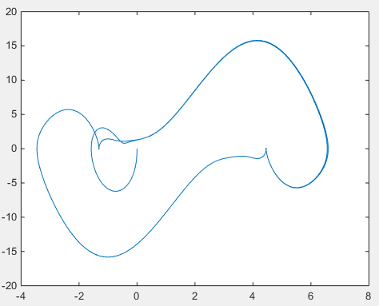
Постройте график фазы соединения. Для этого в командной строке MATLAB можно ввести следующий код:
figure; plot(q.data, w.data);