Маятник - это простейшая механическая система, которую можно смоделировать. Эта система содержит два корпуса, звено и неподвижный шарнир, соединенные поворотным соединением. В этом учебном пособии мы моделируем и моделируем маятник с помощью пользовательского блока связи, созданного в модуле «Модель простой связи». Блок поворотного соединения обеспечивает степень свободы вращения между звеном и мировой рамкой.
В командной строке MATLAB ® введитеsmnew. Библиотека блока Simscape™ Multibody™ и образцовый шаблон с обычно используемыми блоками открываются.
Удаление блоков «Конвертер Simulink-PS», «Конвертер PS-Simulink», «Область» и «Жесткое преобразование». Они не нужны в этом учебном пособии.
Добавьте в модель пользовательский блок «Простая связь», созданный в окне «Модель простой связи».
Добавьте в модель блок «Соединение вращения». Этот блок можно найти в библиотеке Simscape > Multibody > Joints. Этот блок обеспечивает одну степень свободы вращения между кадрами портов.
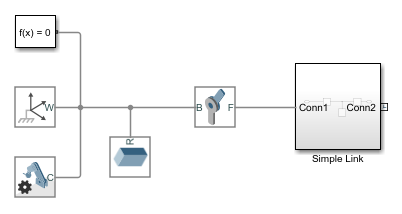
Подключите блоки, как показано на рисунке. Ориентация порта блока Поворотное соединение (Revolute Joint) становится важной, когда задаются цели состояния соединения, предписываются вводы срабатывания соединения или считываются динамические переменные соединения. Блок поворотного соединения интерпретирует каждую величину как величину, применяемую к ведомой раме относительно базовой рамы, поэтому переключение соединений портов может повлиять на сборку модели и моделирование.
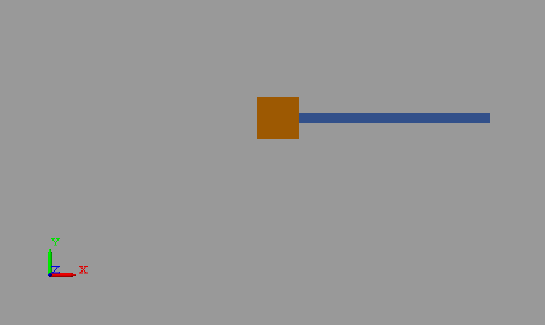
В диалоговом окне «Твердотельный блок» задайте следующие параметры. Этот блок жестко соединяется с рамой World и поэтому не оказывает влияния на динамику модели. Параметры инерции можно оставить в их значениях по умолчанию.
| Параметр | Стоимость | Единицы |
|---|---|---|
| Геометрия > Размеры | [4 4 4] | Изменить на cm |
| Графика > Визуальные свойства > Цвет | [0.80 0.45 0] | Неприменимо |
Блок вращения соединения использует общую ось Z опорной и ведомой рам в качестве оси вращения соединения. Чтобы маятник колебался под действием силы тяжести, измените вектор тяжести, чтобы он больше не выравнивался с осью Z. Для этого в диалоговом окне Блок конфигурации механизма (Mechanism Configuration block) задайте для параметра Равномерная сила тяжести (Uniform Gravity) > Сила тяжести (Gravity) значение [0 -9.81 0].
Требуемый угол соединения можно задать с помощью меню Цели состояния (State Targets) в диалоговом окне Блок вращения соединения (Revolute Joint). Для этого выберите «Цели состояния» > «Положение» и введите требуемый угол соединения. В данном учебном пособии угол можно оставить в значении по умолчанию, соответствующем горизонтальному начальному положению маятника.
Откройте окно Параметры конфигурации (Configuration Parameters). На вкладке Моделирование (Modeling) щелкните Параметры модели (Model Settings).
На вкладке Решатель (Solver) задайте для параметра Решатель (Solver) значение ode15s (stiff/NDF). Этот решатель рекомендуется для физических моделей.
Задать максимальный размер шага равным 0.01 и нажмите кнопку ОК. Небольшой размер шага увеличивает точность моделирования и создает более плавную анимацию в Mechanics Explorer. Малые размеры ступеней могут оказывать вредное влияние на скорость моделирования, но в такой простой модели значение 0.01 обеспечивает хороший баланс между скоростью моделирования и точностью.
Обновите блок-схему. На вкладке Моделирование (Modeling) щелкните Обновить модель (Update Model). Откроется Mechanics Explorer с 3-D видом модели в ее начальной конфигурации.
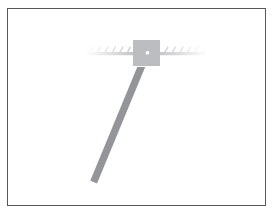
В окне инструментов Проводника Mechanics убедитесь, что для параметра соглашения Вид (View convention) задано значение Y up (XY Front). Это соглашение о представлении гарантирует выравнивание силы тяжести по вертикали на экране. Нажмите кнопку стандартного вида, чтобы обновить отображение Проводника Mechanics. На рисунке показан вид спереди модели. Сохраните настройки визуализации, нажав кнопку Сохранить конфигурацию проводника в модели.![]()
Запустите моделирование. Mechanics Explorer воспроизводит основанную на физике анимацию модели маятника.
Сохраните модель в удобной папке под именем simple_pendulum. Эту модель можно повторно использовать в учебном пособии «Анализ простого маятника».
