Кинематическая зависимость между червячными и зубчатыми телами с перпендикулярными непересекающимися осями вращения
Simscape/Multibody/Зубчатые колеса и муфты/Зубчатые колеса

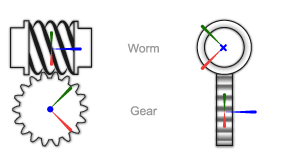
Блок зависимости червяка и зубчатого колеса представляет кинематическую зависимость между червячным и зубчатым телами, удерживаемыми под прямым углом. Порт базовой рамы идентифицирует соединительную раму на червяке, а порт ведомой рамы идентифицирует соединительную раму на шестерне. Оси вращения совпадают с осями z соединительной рамы. Червяк и шестерня вращаются с фиксированным отношением скоростей, определяемым радиусами шага шестерни или отношением зубьев к резьбе.
Направление червячной резьбы может соответствовать как правому, так и левому условию. Используемое соглашение определяет относительные направления скорости вращения червяка и шестерни. Правостороннее соглашение заставляет червяк и шестерню вращаться в одном направлении относительно соответствующих осей Z. Левостороннее соглашение заставляет червяк и шестерню вращаться в противоположных направлениях.
Блок представляет только характеристику кинематической зависимости для червячно-зубчатой системы. Инерция и геометрия зубчатого колеса - это свойства твердого тела, которые необходимо задать с помощью твердотельных блоков. Модель зависимости зубчатого колеса является идеальной. Обратные зазоры и потери передач из-за кулона и вязкого трения между зубьями игнорируются. Однако можно моделировать вязкое трение в соединениях, задав коэффициенты демпфирования в блоках соединений.
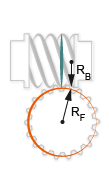
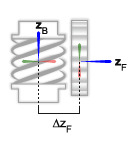
Зависимость реечной передачи параметризуется с точки зрения размеров кругов червяка и шага зубчатой передачи. Окружности шага представляют собой воображаемые окружности, концентричные телам червяка и шестерни и касательные к точке контакта резьбы. Радиусы шага, помеченные RB и RF на чертеже - радиусы, которые имели бы червяк и шестерня, если бы они были сведены к фрикционным цилиндрам во взаимном контакте.
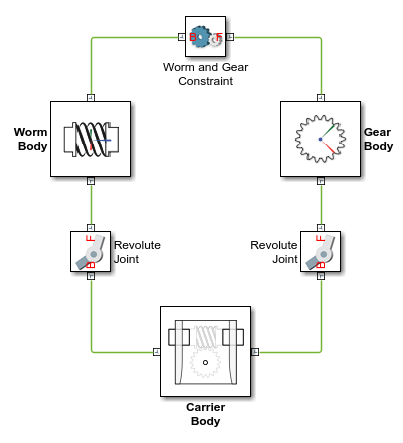
Ограничения зубчатой передачи возникают в замкнутых кинематических контурах. На рисунке показана топология с замкнутым контуром простой червячной и зубчатой модели. Соединительные блоки соединяют червячные и зубчатые тела с общим приспособлением или водилом, определяя максимальные степени свободы между ними. Блок зависимости червяка и зубчатого колеса соединяет червячные и зубчатые тела, устраняя одну степень свободы и эффективно соединяя червячные и зубчатые движения.
Блок накладывает особые ограничения на относительные положения и ориентации рам зубчатых соединений. Ограничения гарантируют, что зубчатые колеса собираются только на расстояниях и углах, подходящих для создания сетки. Блок применяет ограничения во время сборки модели, когда он сначала пытается поместить зубчатые колеса в сетку, но полагается на остальную часть модели, чтобы сохранить зубчатые колеса в сетке во время моделирования.
Ограничения по позициям
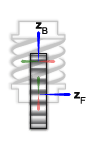
Расстояние между z-осями основания и рамы толкателя, обозначенное на рисунке dB-F, должно быть равно расстоянию между центрами зубчатых колес.
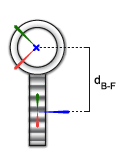
Поступательное смещение между базовой и ведомой рамками вдоль z-оси ведомой рамы, обозначенной на рисунке как ΔZF, должно быть равно нулю.
Ограничения ориентации
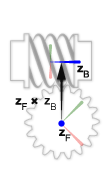
Оси Z базовой и ведомой рам должны быть перпендикулярны друг другу. Оси Z показаны синим цветом на рисунке.
Поперечное произведение z-оси рамы толкателя с z-осью базовой рамы должно быть вектором, направленным от начала координат рамы толкателя к оси z базовой рамы. Оси Z и их вектор поперечного произведения показаны на рисунке. Перекрестное произведение определяется как z ^ B.
Зависимость конического зубчатого колеса | Зависимость общего зубчатого колеса | Зависимость стойки и шестерни
