Кинематическая зависимость между двумя коническими телами зубчатых колес с угловыми пересекающимися осями вращения
Simscape/Multibody/Зубчатые колеса и муфты/Зубчатые колеса

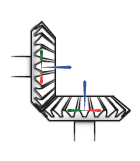
Блок зависимости конического зубчатого колеса представляет кинематическую зависимость между двумя телами зубчатого колеса с пересекающимися осями вращения, удерживаемыми под заданным углом. Порты основания и ведомой рамы идентифицируют соединительные рамы на корпусах зубчатых колес. Оси вращения шестерни совпадают с осями z соединительной рамы. Зубчатые колеса вращаются с фиксированным отношением скоростей, определяемым радиусами шага зубчатого колеса.
Блок представляет только характеристику кинематической зависимости для системы конических зубчатых колес. Инерция и геометрия зубчатого колеса - это свойства твердого тела, которые необходимо задать с помощью твердотельных блоков. Модель зависимости зубчатого колеса является идеальной. Обратные зазоры и потери передач из-за кулона и вязкого трения между зубьями игнорируются. Однако можно моделировать вязкое трение в соединениях, задав коэффициенты демпфирования в блоках соединений.
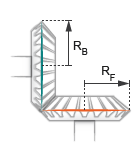
Ограничение конического зубчатого колеса параметризуется с точки зрения размеров кругов шага зубчатого колеса. Окружности шага представляют собой воображаемые окружности, концентричные телам зубчатых колес и касательные к точке контакта зубьев. Радиусы шага, помеченные RB и RF на чертеже - внешние радиусы, которые имели бы зубчатые колеса, если бы они были сведены к фрикционным конусам во взаимном контакте.
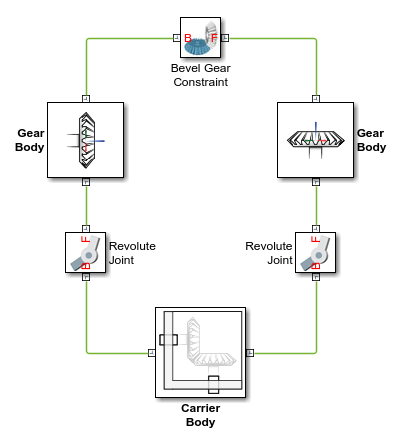
Ограничения зубчатой передачи возникают в замкнутых кинематических контурах. На рисунке показана топология с замкнутым контуром модели простого конического зубчатого колеса. Соединительные блоки соединяют тела зубчатых колес с общим приспособлением или водилом, определяя максимальные степени свободы между ними. Блок ограничения конического зубчатого колеса соединяет тела зубчатого колеса, устраняя одну степень свободы и эффективно соединяя движения зубчатого колеса.
Блок накладывает особые ограничения на относительные положения и ориентации рам зубчатых соединений. Ограничения гарантируют, что зубчатые колеса собираются только на расстояниях и углах, подходящих для создания сетки. Блок применяет ограничения во время сборки модели, когда он сначала пытается поместить зубчатые колеса в сетку, но полагается на остальную часть модели, чтобы сохранить зубчатые колеса в сетке во время моделирования.
Ограничения по позициям
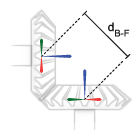
Расстояние между основанием и началом рамы толкателя должно быть таким, чтобы при заданных углах вала и радиусах шага окружности шага шестерни были касательными друг к другу. Это расстояние, обозначаемое dB-F, следует из закона косинусов:
2RBRFcos (
где RB - радиус подачи основного механизма, РФ - радиус подачи механизма последователя, и θShaft - угол пересечения между осями вращения.
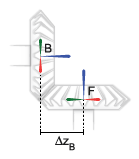
Расстояние между базовой и ведомой рамками вдоль оси z базовой рамы, обозначенной ΔzB, должно быть равно:
startВал)
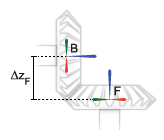
Расстояние между базовой и ведомой рамой по оси Z ведомой рамы, обозначенное ΔzF, должно быть равно:
startВал)
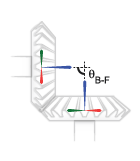
Ограничения ориентации
Воображаемые линии, отходящие от оси z основания и толкателя, должны пересекаться под углом вала, заданным в диалоговом окне блока. На чертеже угол обозначен В-F. Если для параметра «Оси вала» установлено значение Perpendicular, угол 90 °.
Зависимость конического зубчатого колеса | Кирпичное тело | Зависимость общего зубчатого колеса | Цилиндрическое твердое тело | Эллипсоидальное твердое тело | Выдавленное твердое тело | Зависимость стойки и шестерни | Повернутое твердое тело | Сферическое твердое тело

