Вы моделируете сочлененную систему, соединяя тела через соединения и иногда зубчатые колеса и другие зависимости. Тела вносят свои инерции в модель, а соединения, зубчатые колеса и зависимости определяют относительные степени свободы, существующие между телами. Два типа компонентов соединяются, связывая порты рамы в блоках «Соединение» (Joint), «Зубчатое колесо» (Gear) и «Ограничение» (Constraint) с портами рамы в подсистемах тела.
Simscape™ Multibody™ автоматически собирает модель при обновлении блок-схемы. Во время обновления модели Simscape Multibody определяет начальные состояния соединений - их положения и скорости - так, чтобы результирующая сборка удовлетворяла всем кинематическим ограничениям в модели. Этот процесс происходит в две фазы, при этом алгоритм сборки сначала вычисляет положения соединения, а затем скорости соединения. Полный процесс называется сборкой модели.
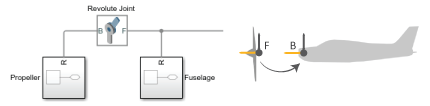
Стыки соединяются с корпусами через рамы. Каждый соединительный блок содержит два порта рамы, основание (В) и толкатель (F), идентифицирующие точки соединения в соседних телах и относительные направления, в которых они могут перемещаться. При подключении этих портов к рамам в подсистемах тела определяется способ соединения самих тел при сборке модели.
Соединительные рамы, идентифицирующие точки соединения и ось вращения воздушного винта
Если соединение не имеет приведения в действие и сенсорных выходов, его порты рамы полностью взаимозаменяемы. В этом случае можно переключать тела, к которым подключаются порты, не влияя на динамику модели или выходные сигналы совместного зондирования. Если соединение имеет входы срабатывания или выходы датчика, возможно, потребуется обратить сигналы срабатывания или датчика для получения того же динамического поведения и результатов моделирования.
Чтобы изменить точки соединения соединения, необходимо изменить рамки соединения в смежных подсистемах тела. Для этого необходимо задать преобразование перемещения с помощью блока «Жесткое преобразование». Можно добавить новые блоки жесткого преобразования к подсистемам тела или, при необходимости, изменить преобразования преобразования в существующих подсистемах жесткого преобразования.
Дополнительные сведения о том, как программное обеспечение Simscape Multibody интерпретирует порты, узлы и линии кадров, см. в разделе Работа с кадрами.
Чтобы получить ожидаемое движение в модели, необходимо правильно выровнять различные оси движения соединения. Это означает выравнивание самих соединений, как это наблюдается или предполагается в реальной системе. Несовпадение осей соединения может привести к неожиданному движению, но часто приводит к чему-то более серьезному, например, к невозможности сборки и моделирования.
Можно задать и изменить выравнивание соединения, вращая рамки соединения, локальные по отношению к смежным подсистемам тела. Для этого можно задать преобразования вращения с помощью блоков жесткого преобразования либо путем добавления новых блоков к подсистемам тела, либо, при необходимости, путем изменения преобразований вращения в существующих блоках в подсистемах.
Зачем менять ориентацию соединений через рамы подсистем кузова? Каждый из примитивов в блоке соединения имеет заданную ось движения, такую как x или z. Определение оси является фиксированным и не может быть изменено. Переориентация рамок соединения, локальных для смежных подсистем корпуса, обеспечивает естественный способ переориентации соединений, избегая путаницы относительно того, какую ось использует конкретное соединение.
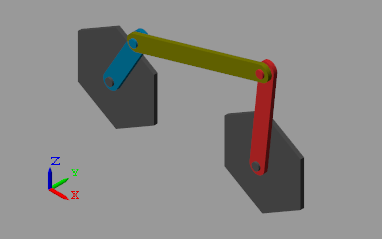
Соединения могут начать моделирование из различных состояний. Например, кривошипно-шатунное соединение кривошипно-коромысловой связи может начинаться под любым углом от 0 ° до 360 °. В результате во время сборки модели Simscape Multibody должен выбирать из множества одинаково допустимых состояний. В диалоговых окнах Блок соединения (Joint block) можно направлять выбранные состояния, указывая цели состояний.
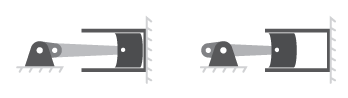
Кривошипно-ползунковый механизм в полностью удлиненных и полностью отведенных начальных конфигурациях
Цели состояния не обязательно должны быть точными значениями. Если Simscape Multibody не может точно достичь цели состояния, он выполняет поиск состояния соединения, ближайшего к цели состояния. Например, если задана цель состояния положения 60 °, но соединение может достигать только углов от 0 ° до 45 °, Simscape Multibody попытается собрать соединение под углом 45 °.
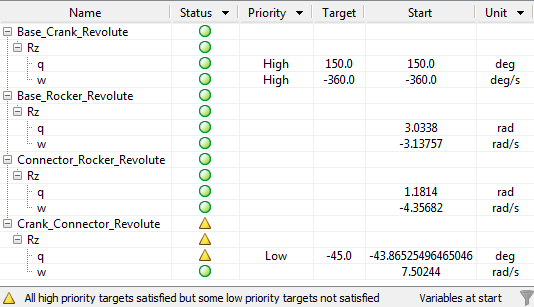
Насколько близко фактическое совместное состояние к цели состояния, зависит от кинематических ограничений в модели, любых конфликтов с другими целями состояния и уровня приоритета цели состояния - ранжирования, которое определяет, какие из двух целей состояния должны удовлетворять, если они оказываются взаимно несовместимыми. Можно установить уровень приоритета равнымLow или High.
Simscape Multibody сначала пытается точно удовлетворить все цели состояния. Если возникает конфликт целей состояния, Simscape Multibody игнорирует цели состояния низкого приоритета и пытается удовлетворить только цели состояния высокого приоритета. Если конфликт цели состояния все еще существует, Simscape Multibody игнорирует также цели состояния высокого приоритета и пытается собрать модель в ближайшей допустимой конфигурации.
Можно задать цели состояния для всех соединений в открытой кинематической цепи. Однако, чтобы избежать ошибок моделирования, каждая замкнутая цепь должна содержать по крайней мере одно соединение без целевых состояний.
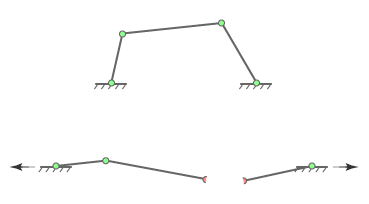
Модель успешно собирается только в том случае, если соединения между ее телами совпадают друг с другом. Если при удовлетворении одной кинематической зависимости Simscape Multibody должен нарушить другую кинематическую зависимость, модель является кинематически недействительной, и сборка завершается неуспешно. Это происходит, например, когда заземляющее звено четырехпалубного узла превышает суммарную длину остальных трех звеньев, препятствуя сборке по меньшей мере одного соединения.
Отказ соединения при сборке в четырехпалубном соединении с очень длинным наземным соединением
Для обеспечения правильной сборки модели используйте следующие утилиты Simscape Multibody и Simscape:
Обозреватель Mechanics - утилита визуализации Simscape Multibody. Визуально исследуйте модель с разных точек зрения, чтобы убедиться, что ее тела соединяются в ожидаемых местах и с правильной ориентацией.
Средство просмотра переменных - утилита создания отчетов о состоянии Simscape. Проверьте статус сборки отдельных соединений и ограничений и сравните целевые состояния с фактическими состояниями соединений, достигнутыми во время сборки.
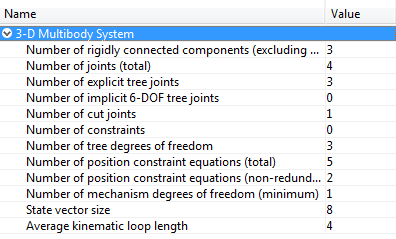
Средство просмотра статистики - утилита создания отчетов о метриках Simscape. Проверьте, помимо прочих метрик, степени свободы, количество соединений и количество ограничений в модели.