Кадры - это осевые триады, которые кодируют данные о положении и ориентации в 3-D модели с несколькими телами. Каждая триада состоит из трех перпендикулярных осей, которые пересекаются в начале координат. Начало координат определяет положение рамы, а оси - ориентацию рамы. Оси закодированы цветом, а ось X - красным, ось Y - зеленым, а ось Z - синим.
Каждый сплошной компонент имеет одну или более локальных рам, к которым он жестко прикреплен. Позиционируя и ориентируя рамки компонентов, можно позиционировать и ориентировать сами компоненты. Это роль кадров в модели - позволяет задать пространственные отношения между компонентами.
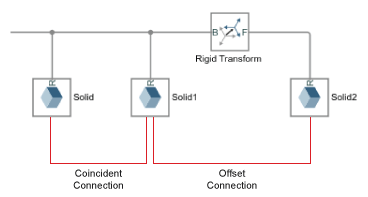
Порт кадра идентифицирует локальный кадр компонента. Например, порт R-кадра твердотельного блока идентифицирует локальный опорный кадр твердого тела. Каждый блок имеет один или несколько портов полки, которые соединяются для размещения связанных компонентов в пространстве. На рисунке показаны порты опорной рамы в нескольких блоках Body Elements.

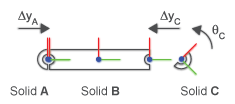
Соединения между портами кадров определяют пространственные отношения между их кадрами. Прямая линия соединения кадров делает соединенные кадры совпадающими в пространстве. Блок жесткого преобразования задает вращательное и поступательное смещения между кадрами. На рисунке показаны примеры совпадающих и смещенных соединений кадров.
Совпадающее соотношение между сплошными кадрами само по себе не является совпадающим соотношением между твердотельными геометриями. Пространственное расположение двух твердотельных геометрий зависит не только от пространственного расположения соответствующих опорных кадров, но также и от того, как геометрия определяется относительно этих кадров.
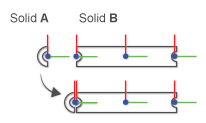
Если две геометрии отличаются друг от друга или если их положения и ориентации относительно их опорных рамок отличаются друг от друга, то совпадение опорных рамок приведет к смещению твердотельных геометрий. На рисунке соединение каркаса тела А с левым каркасом тела В соединяет тела таким образом, что их геометрия смещается относительно друг друга.
Твердотельный блок обеспечивает интерфейс создания фреймов, который можно использовать для создания новых пользовательских фреймов. Пользовательский каркас можно позиционировать и ориентировать с помощью геометрических элементов, таких как вершины, кромки и грани. С точки зрения инерции удобнее сделать то же самое с помощью центра масс и трех главных осей твердого тела.
Создайте пользовательский фрейм с помощью интерфейса создания фрейма блока «Твердое тело файла». Затем разместите начало координат рамы в центре масс и выровняйте оси рамы по основным осям инерции. Результатом является кадр, совпадающий с основным опорным кадром - тот, в котором матрица инерции диагональна, а произведения инерции равны нулю.
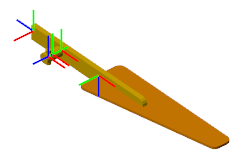
В командной строке MATLAB введите smdoc_lbeam_inertia. Открывается модель с твердым телом, имеющим форму L-образной балки.
В диалоговом окне «Твердотельный блок файла» нажмите кнопку «Создать рамку». Диалоговое окно «Твердотельный блок файла» переключается на вид создания рамы.
Измените параметр «Имя кадра» на P (для «Основной кадр»). Панель визуализации и порт кадра используют эту метку для идентификации нового кадра.
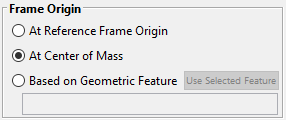
В группе «Начало рамки» установите переключатель «В центре масс».
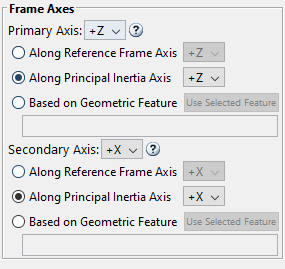
В разделе «Оси рам» > «Первичные оси» и «Оси рам» > «Вторичная ось» установите флажок «Вдоль главной оси инерции». Примите параметры оси по умолчанию (+Z и +X, соответственно) и нажмите кнопку «Сохранить». Диалоговое окно блока переключается обратно на основной вид (параметры).
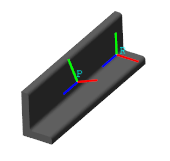
На панели инструментов визуализации нажмите кнопку «Переключить видимость рамок». На панели визуализации отображаются кадры твердого тела, включая новый пользовательский кадр P.
Вращательное и поступательное смещения между кадрами называются преобразованиями. Если преобразования постоянны во времени, они называются жесткими. Жесткие преобразования позволяют фиксировать относительные положения и ориентации компонентов в пространстве, например, собирать твердые тела в тела.
![]()
Блок «Жесткое преобразование» используется для задания вращательного, поступательного или смешанного жесткого преобразования между кадрами. Преобразования являются направленными. Они задают поворот и перемещение рамы, известной как толкатель, относительно рамы, известной как база.
Метки порта кадра в блоке жесткого преобразования идентифицируют базовый и ведомый кадры. Полка, подключенная к порту B, служит в качестве базы. Рама, соединенная с портом F, служит в качестве толкателя. Реверсирование соединений портов изменяет направление, в котором применяется преобразование кадра.
Преобразование можно задать различными методами. Для вращательных преобразований они включают пары ось-угол, матрицы вращения и последовательности вращения. Для поступательных преобразований они включают векторы поступательного смещения, определенные в декартовых или цилиндрических системах координат.
Если вращательное и поступательное преобразования равны нулю, то связанные кадры совпадают в пространстве. Эта взаимосвязь известна как идентичность и эквивалентна прямой линии соединения кадров между портами кадров, т.е. без блока жесткого преобразования.
Можно визуализировать кадры и исследовать преобразования между кадрами с помощью панели визуализации твердотельных блоков или Проводника Mechanics. Панель визуализации твердотельных блоков используется для просмотра кадров одного твердотельного элемента. Нажмите кнопку «Переключить видимость рамок» на панели инструментов визуализации, чтобы отобразить все сплошные рамки.
Рамка на теле
Используйте Mechanics Explorer для визуализации кадров более чем одного твердотельного элемента, например, в составных телах, подсистемах с несколькими телами или полных моделях с несколькими телами. Выберите команду Вид (View) > Показать кадры (Show Frames) в меню Проводника Mechanics, чтобы показать все кадры. Выберите узел в области древовидной структуры, чтобы показать только те кадры, которые принадлежат выбранному компоненту.
Кадры на теле
В этом примере показано смещение двух тел относительно друг друга путем задания преобразования кадра между опорными кадрами твердого тела. Он показывает три типа преобразований: перемещение, вращение и комбинированное преобразование.
Создание модели с двумя телами
В командной строке MATLAB ® введитеsmnew. Откроется шаблон модели Simscape™ Multibody™ с часто используемыми блоками.
Удалите блоки Simulink-PS Converter, PS-Simulink Converter и Scope, поскольку они не используются в этом примере.
Отображение имен блоков «Жесткое преобразование» и «Твердое тело кирпича». Щелкните правой кнопкой мыши блоки и выберите «Формат» > «Показать имя блока» > «Вкл».
Создайте копию блока «Твердое тело кирпича» и переименуйте блоки «Твердое тело кирпича» в «Основание» и «Толкатель».
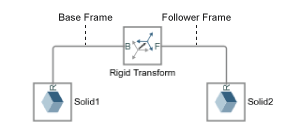
Подключите остальные блоки, как показано на следующем рисунке.
![]()
Запустите модель. Откроется Mechanics Explorer с визуализацией модели. В обозревателе Mechanics нажмите кнопку Изометрический вид (Isometric view).
![]()
На панели древовидной структуры щелкните узлы База (Base) и Толкатель (Follower). На панели визуализации отображаются опорные рамки двух блоков «Твердое тело кирпича», которые показывают, что они совпадают в пространстве.
![]()
Применение перевода
В этом разделе показано, как применить перемещение к ведомому кадру с помощью блока «Жесткое преобразование».
Соедините блок жесткого преобразования между двумя блоками твердого кирпича.
![]()
Дважды щелкните блок «Жесткое преобразование». В диалоговом окне задайте:
Перевод > Метод для Cartesian.
Перевод > Смещение в [1 1 0] m. Элементы массива представляют собой смещения перемещения вдоль базовой рамки x, y и z-осей.
Нажмите кнопку ОК, чтобы сохранить настройки и закрыть диалоговое окно Жесткое преобразование (Rigid Transform).
Чтобы обновить модель, нажмите кнопку Обновить схему в обозревателе Mechanics.
На панели древовидной структуры щелкните узел «Жесткое преобразование», чтобы показать рамки «Основание» и «Толкатель».
![]()
Применить поворот
В этом разделе показано, как применить поворот вокруг оси X к ведомой раме с помощью блока «Жесткое преобразование».
В диалоговом окне «Блок жесткого преобразования» задайте:
Перевод > Метод для None. Перевод здесь не указан.
Поворот > Метод для Standard Axis.
Поворот > Ось к +X. ось X - ось вращения.
Поворот > Угол до 45 град.
Нажмите кнопку ОК и обновите блок-схему.
На панели дерева щелкните узел «Жесткое преобразование». На следующем рисунке показан процесс и конечный результат вращения. В конечном результате подсвечивается твердое тело кирпича толкателя.
![]()
Применение комбинированного преобразования
В этом разделе показано, как применить комбинированное преобразование, включающее перемещение и поворот к ведомому кадру с помощью блока «Жесткое преобразование».
В диалоговом окне «Блок жесткого преобразования» задайте:
Перевод > Метод для Cartesian.
Перевод > Смещение в [1 1 0].
Поворот > Метод для Standard Axis.
Поворот > Ось к +X. ось X - ось вращения.
Поворот > Угол до 45 град.
Нажмите кнопку ОК и обновите блок-схему.
На панели дерева щелкните узел «Жесткое преобразование». На следующем рисунке показан процесс и конечный результат комбинированного преобразования.
![]()
Когда в блоке «Жесткое преобразование» задаются как вращательные, так и поступательные преобразования, блок всегда сначала применяет перемещение к ведомому кадру. Трансляции описывают, как кадр-толкатель перемещается относительно своего базового кадра. Любые повороты вокруг осей базовой рамы всегда соответствуют осям перемещенной базовой рамы.
