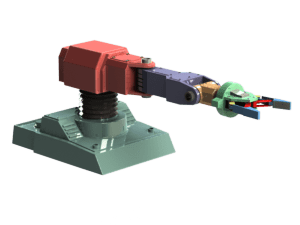
В этом примере показано, как создать модель Simscape™ Multibody™ из XML-файла описания нескольких тел с помощью smimport функция. Пример основан на файле описания множества тел с именем sm_robot и наборе файлов геометрии деталей, включенных в установку Simscape Multibody. Эти файлы описывают роботизированную модель руки, показанную на рисунке.
Файлы описания и геометрии деталей, используемые в этом примере, находятся в папке
matlabroot\toolbox\physmod\sm\smdemos\import\robot
C:Programs\MATLAB\
В командной строке MATLAB введите команду:
smimport('sm_robot');smimport настройки функции.
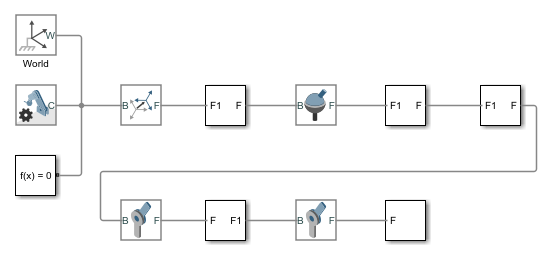
Блоки в созданной модели параметризуются в терминах переменных MATLAB. Числовые значения этих переменных определяются в файле данных с именем sm_robot.m и хранятся в той же активной папке, что и созданная модель.
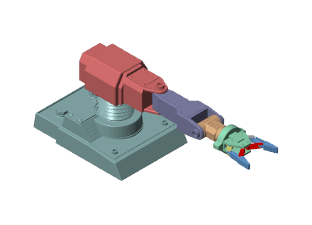
Обновите схему для визуализации модели. На вкладке Моделирование (Modeling) щелкните Обновить модель (Update Model). Mechanics Explorer открывается со статической визуализацией модели роботизированной руки в ее начальной конфигурации.

Соглашение представления по умолчанию в обозревателе Mechanics отличается от соглашения CAD-приложения, используемого для создания исходной модели сборки. В обозревателе Mechanics используется соглашение о представлении по оси Z, а в CAD-приложении - соглашение о представлении по оси Y.
Измените соглашение о представлении на панели инструментов Проводника Mechanics, установив для параметра Соглашение о представлении значение Y up (XY Front). Затем выберите стандартный вид в меню «Вид» > «Стандартные виды», чтобы применить новое соглашение о представлении.
Попробуйте смоделировать модель. Поскольку роботизированная рука не имеет системы управления, она просто падает под действием силы тяжести. Блоки Simulink ® можно использовать для создания системы управления, необходимой для управления движением роботизированной руки. Система управления будет преобразовывать выходные сигналы датчика движения в входные сигналы приведения в действие в различных соединениях. В диалоговых окнах блока соединения можно открыть сенсорные и исполнительные порты.
