Импорт модели CAD, URDF или панели инструментов системы робототехники
[ создает модель Simscape Multiobody из модели CAD, URDF или панели инструментов системы робототехники.H,dataFileName] = smimport(modelSource)
modelSource - имя файла или объекта, содержащего модель, или, для импорта САПР, его промежуточное представление. CAD-модели должны быть в XML-файлах, модели URDF в файлах URDF и модели Robotics System Toolbox в RigidBodyTree объекты. XML-файлы должны соответствовать XML-схеме Simscape Multibody, а файлы URDF - спецификации URDF. Для создания требуется лицензия Robotics System Toolbox RigidBodyTree объекты.
H является дескриптором модели и dataFileName - имя поддерживающего файла, который в импортированных CAD-моделях сохраняет числовые значения параметров блока в массиве структуры, заполненном переменными MATLAB, на которые ссылаются блоки. Файл данных предоставляет механизм обновления импортированной модели при изменении CAD-модели. Модели, импортированные из файлов URDF илиRigidBodyTree объекты не полагаются на файлы данных для параметров блока.
XML-файлы могут поступать из разных источников. smexportonshape функция преобразует CAD-модели Onshape в XML-файлы для импорта. Подключаемый модуль Simscape Multibody Link аналогичен для CAD-моделей Autodesk Inventor ®, PTC ® и SolidWorks ®. Подключаемый модуль можно бесплатно загрузить. Для других CAD-приложений и для инструментов моделирования нескольких тел других типов XML-схема Simscape Multibody позволяет создать пользовательское приложение для экспорта моделей.
CAD, URDF и RigidBodyTree все модели имеют одни и те же компоненты. Это (i) жесткие тела, также известные как детали в CAD-моделях и связи в моделях URDF, и (ii) кинематические зависимости, в некоторых случаях упакованные как соединения. Жесткие тела импортируются как подсистемы Simulink с твердотельными блоками и блоками жесткого преобразования - элементарными компонентами, из которых получаются атрибуты формы, инерции, цвета и размещения. Зависимости отображаются в блоки соединений, зубчатых колес и других зависимостей.
Модели URDF содержат <link> элементы, которые в свою очередь содержат <joint> элементы. Аналогично, RigidBodyTree объекты содержат RigidBody объекты, которые в свою очередь содержат Joint объекты. Эта иерархия изменяется при импорте в Simscape Multibody. Соединения становятся братьями и сестрами жестких тел и имеют не внутри подсистем жестких тел, а рядом с ними. Пределы соединения и исходные позиции сохраняются, а затем в качестве целей состояния положения в соответствующих блоках соединения.
Примечание
Пределы соединения импортируются из URDF и RigidBodyTree модели, но не из CAD-моделей. Воспроизводите пределы стыков CAD-моделей вручную, если необходимо - путем включения пределов стыков в блоках стыков и установки предельных положений соответствующими значениями.
[ создает модель Simscape Multiobody из модели CAD, URDF или панели инструментов системы робототехники с пользовательским именем или регенерирует файл данных ранее импортированной CAD-модели. Большинство аргументов пары «имя-значение» применяются только к CAD-моделям. Использовать H,dataFileName] = smimport(modelSource,Name,Value)ImportMode для регенерации файлов данных параметров и PriorDataFile фиксация непреднамеренных изменений модели, таких как удаление детали или изменение ее имени.
Импорт CAD-модели роботизированной руки. Модель экспортирована в формате XML с помощью Simscape Multibody Link. XML-файл имеет имя sm_robot.xml и является частью установки Simscape Multibody.
Импортировать модель и сохранить ее в памяти как Untitled. Позднее можно изменить имя. Поскольку модель имеет формат XML, в ее имени можно опустить расширение.
smimport('sm_robot');Обновите схему, чтобы собрать модель и визуализировать ее в обозревателе Mechanics. На вкладке Моделирование (Modeling) щелкните Обновить модель (Update Model).
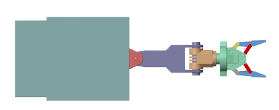
CAD-модели часто принимают ось y в качестве вертикальной оси, а модели Simscape Multibody - в качестве оси Z. В результате импортированная модель появляется на экране сбоку. Используйте выпадающий список Показать соглашение (View convention) в Mechanics Explorer, чтобы исправить разницу в соглашении.
На панели инструментов Mechanics Explorer установите для параметра «Соглашение о видах» значение «Y up» (XY Front) и выберите стандартную точку обзора, например «Изометрия», показанную ниже.
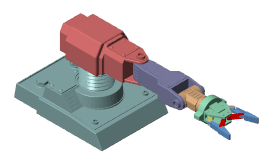
Выбор стандартного вида активирует новое соглашение по виду. Модель поворачивается, чтобы принять ориентацию в исходной CAD-модели.
Моделирование модели. Рука робота не имеет системы управления и беспорядочно качается под действием силы тяжести. Создавайте модель, добавляя системы управления для моделирования полезных задач. Добавьте внутреннюю механику к соединениям, чтобы ослабить их движения, и укажите цели соединения, чтобы изменить исходное положение руки.
Импорт CAD-модели роботизированного манипулятора и сохранение ее в активной папке с именем robotto. Имя файла данных параметров robottos_data_file.
smimport('sm_robot','ModelName','robotto',... 'DataFileName','robottos_data_file');
Выполните регенерацию файла данных для импортированной CAD-модели роботизированного манипулятора. Во избежание перезаписи исходного файла данных присвойте новому файлу имя robottos_new_data_file.
smimport('sm_robot','ImportMode','dataFile','DataFileName',... 'robottos_new_data_file','PriorDataFile','robottos_data_file');
Поместите импортированную модель в новый файл данных и повторно инициализируйте рабочее пространство модели.
hws = get_param(bdroot,'modelworkspace'); hws.DataSource = 'MATLAB File'; hws.FileName = 'robottos_new_data_file'; hws.reload
Чтобы сделать то же самое с помощью Проводника моделей, сначала выберите команду МОДЕЛИРОВАНИЕ > КОНСТРУКЦИЯ > Рабочее пространство модели, чтобы открыть Обозреватель моделей. Затем в иерархии моделей обозревателя моделей щелкните левой кнопкой мыши Модель (Model) Рабочее пространство (Workspace). На панели «Рабочее пространство модели» введите robottos_new_data_file.m в параметре Имя файла (File Name) и нажмите кнопку Повторно инициализировать из источника (Reinitialize from Source), чтобы применить изменение.
Импорт модели URDF робота-гуманоида. Модель имеет имя sm_humanoid.urdf и является частью установки Simscape Multibody.
Импортировать модель и сохранить ее в памяти как Untitled. Позднее можно изменить имя. Поскольку модель имеет формат URDF, требуется расширение файла.
smimport('sm_humanoid.urdf');Обновите схему, чтобы визуализировать модель в ее начальной конфигурации с помощью Mechanics Explorer. На вкладке Моделирование (Modeling) щелкните Обновить модель (Update Model).
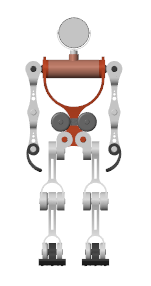
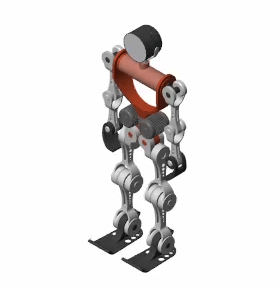
Моделирование модели. Как и в случае с рукой робота, у гуманоидного робота отсутствует система управления и он беспорядочно качается под действием силы тяжести. Линия обочины служит корневым телом в модели URDF, поэтому после импорта она фиксируется к мировой рамке.
Попробуйте изменить модель, например, удалив жесткое соединение между линией обочины и мировой рамой и добавив подсистемы управления в различные соединения. См. показанный пример Humanoid Robot для версии модели с основными органами управления движением. Можно открыть пример, введяsm_import_humanoid_urdf в командной строке MATLAB.
RigidBodyTree ОбъектИмпорт a RigidBodyTree объект для серийного манипулятора LBR iiwa (производства KUKA Robotics). Элементы модели в установке панели инструментов системы робототехники в виде модели URDF с именем iiwa14.urdf.
Преобразование модели URDF в RibidBodyTree объект.
iiwaRBT = importrobot('iiwa14.urdf');Примечание
Для запуска требуется лицензия Robotics System Toolbox importrobot(Панель инструментов системы робототехники).
Импорт iiwaRBT объект в Simscape Multibody.
iiwaSM = smimport(iiwaRBT);
Обновите схему, чтобы визуализировать модель в ее начальной конфигурации с помощью Mechanics Explorer. На вкладке Моделирование (Modeling) щелкните Обновить модель (Update Model).
Добавьте гравитационное ускорение вдоль отрицательной оси z модели, выбрав «Равномерная сила тяжести» > «Сила тяжести» и введя [0 0 -9.80665].
Моделирование модели. Как и в случае с рукой робота, iiwa14 модель не имеет системы управления и беспорядочно качается под действием силы тяжести. Создавайте модель, добавляя системы управления для моделирования полезных задач. Добавьте внутреннюю механику к соединениям, чтобы ослабить их движения, и укажите цели соединения, чтобы изменить исходное положение руки.
smexportonshape | importrobot (Панель инструментов системы робототехники)
