Соединения накладывают между телами первичные кинематические зависимости, которые определяют, как они могут перемещаться относительно друг друга. Соединение может быть физическим соединением, таким как соединение между корпусом и валом линейного гидравлического привода, или виртуальным соединением, таким как соединение между Землей и Луной. В Simscape™ Multibody™ оба типа соединений моделируются с помощью блоков соединения.
Примеры физических и виртуальных связей между телами

Блоки зубчатой передачи и зависимости также накладывают кинематические зависимости между телами. Чем отличаются совместные блоки? В то время как блоки зубчатой передачи и ограничения параметризуются с точки зрения DoF, которые они удаляют между телами, блоки соединения параметризуются с точки зрения предоставляемых ими DoF через модули, называемые примитивами соединения.
Каждый блок соединения соединяет ровно два тела. Такое соединение определяет максимальные степени свободы, или DoF, которые могут совместно использоваться соседними телами. Эти DoFs колеблются от ноля в блоке Сварного шва к шесть - три переводных и три вращательных - в Суставе с 6 финансовыми департаментами и Втулке Совместных блоков. Перемещение означает изменение положения и поворота к изменению ориентации.
Совместные DoF являются мерой мобильности суставов. Исключая другие ограничения в модели, соединение с большим количеством DoF обеспечивает большую свободу движения между соседними телами. Совместные DoF также имеют математическую интерпретацию. Они представляют собой минимальное количество переменных состояния, необходимых для полного определения конфигурации соединения на каждом временном шаге во время моделирования.
Рассмотрим прямоугольное соединение. Это соединение допускает перемещение в плоскости и поэтому имеет два поступательных DoF - по одному для каждого пространственного измерения. На каждом временном шаге конфигурация соединения полностью определяется двумя переменными состояния, координатами положения в плоскости движения [x (t), y (t)]. Это означает, например, что вы можете полностью назначить движение в этом соединении, используя два входных сигнала положения.
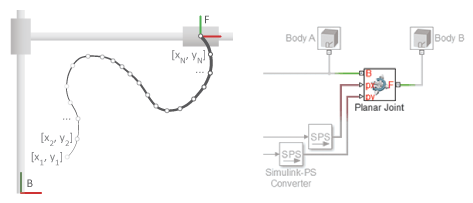
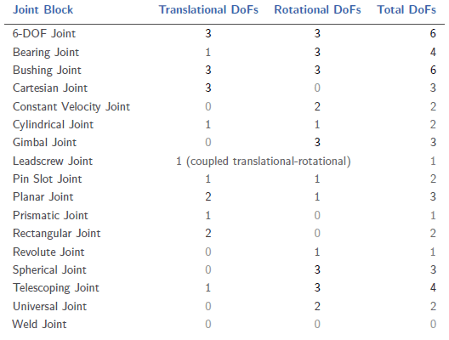
Таблица суммирует DoF, предоставляемые различными объединительными блоками.
Фактические DoF в соединении часто меньше по количеству, чем позволяет только соединение. Это происходит, когда кинематические зависимости в другом месте модели ограничивают относительное движение соседних тел. Такие ограничения могут возникать из-за зубчатых колес в сетке, запрещенных DoF из-за других соединений в замкнутых кинематических контурах и фиксированных расстояний и углов между телами, среди прочих факторов.
Блоки соединения - это ассортимент примитивов соединения, основных, но полных соединений различного рода, которые нельзя разложить дальше - по крайней мере, без потери такого поведения, как вращательно-поступательное соединение ходового винтового соединения. Число примитивов соединения варьируется от нуля в блоке сварного соединения до шести в блоке соединения втулки. Существует пять совместных примитивов:
Призматический (Prismatic) - допускает перемещение вдоль одной стандартной оси (x, y или z). Блоки соединения могут содержать до трёх призматических примитивов соединения, по одному для каждого поступательного DoF. Призматические примитивы обозначены P *, где звездочка обозначает ось движения, например Px, Py или Pz.
Вращение (Revolute) - позволяет вращаться вокруг одной стандартной оси (x, y или z). Блоки соединения могут содержать до трех вращающихся примитивов соединения, по одному на каждый вращающийся DoF. Примитивы вращения обозначены как R *, где звездочка обозначает ось движения, например Rx, Ry или Rz.
Сферический (Spherical) - позволяет вращаться вокруг любой оси 3-D, [x, y, z]. Соединительные блоки содержат не более одного сферического примитива, и никогда в сочетании с революционными примитивами. Сферические примитивы помечены S.
Примитив ходового винта (Lead Screv Primitive) - позволяет осуществлять сопряженное вращение и перемещение по стандартной оси (например, z). Этот примитив преобразуется между вращением на одном конце и перемещением на другом. Соединительные блоки содержат не более одного примитива ходового винта. Примитивы ходового винта помечены как LS *, где звездочка обозначает ось движения.
Соединение с постоянной скоростью (Constant Velocity Joint) - позволяет вращаться с постоянной скоростью между пересекающимися и произвольно выровненными валами. Соединительные блоки содержат не более одного примитива постоянной скорости. Примитивы постоянной скорости обозначены CV.
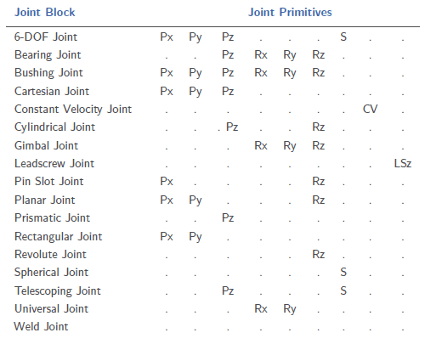
Таблица суммирует общие примитивы и DoF, которые предоставляют различные блоки Joint.
Зачем использовать блоки соединения со сферическими примитивами? Те, у кого три поворотных примитива, восприимчивы к карданному замку - естественной, но часто нежелательной потере одного вращательного DoF, когда любые две оси вращения становятся выровненными. Замок кардана приводит к ошибкам моделирования из-за численных сингулярностей. Сферические примитивы устраняют риск ошибок карданного замка, представляя 3-D вращения с использованием 4-D величин, известных как кватернионы.
Симскейп Многофюзеляжные суставы идеализируются. Они отличаются от реальных соединений тем, что не имеют инерции - подходящего приближения в большинстве моделей, где влияние инерции суставов на динамику системы часто ничтожно мало. Так обстоит дело, например, в шарнирах с постоянной скоростью автомобильных систем трансмиссии, где инерция вала может карликовать инерцию соединения.
Если инерция соединения важна в модели, ее можно учесть с помощью блоков твердого тела или инерции. Подключите порты опорной рамы блока к соответствующим рамам соединения и задайте инерционные свойства соединения в диалоговых окнах блока. Можно задать массу или плотность соединения, произведения инерции, моменты инерции и центр масс. Дополнительные сведения о задании инерции см. в разделе Представление инерции твердого тела.
