Инерция является основным атрибутом всего, что вы можете истолковать как тело. Это сопротивление изменению состояния движения и, что эквивалентно, мера силы или крутящего момента, необходимого для создания определенного ускорения. В отличие от других твердотельных атрибутов, таких как геометрия или цвет, он строго необходим для моделирования модели. В частности, концы соединения - его рамки - должны каждый соединяться с инерцией, что означает, что там, где движение разрешено, должна существовать инерция для приложения силы или крутящего момента.
Инерционный элемент можно моделировать изолированно, без намерения представить тело. Такие инерции полезны, например, при моделировании вибраций, вызванных скоплением бурового раствора на вращающемся автомобильном колесе. Комок отделен от корпуса колеса и его можно моделировать как таковой. Кроме того, его геометрия и цвет в данном случае являются тривиальными деталями, и их можно игнорировать в целях моделирования. При этом вы относитесь к комку как к простой инерции - которой не хватает каких-либо атрибутов, кроме инерции.
Изолированные простые инерции редки в модели. Как правило, вы учитываете инерцию при моделировании полного тела - что-то с геометрией и цветом, как крыло в механизме хлопания крыла, обсуждаемом в разделе Моделирование тел. Начните с концепции тела, смоделируйте это тело как коллекцию тел и задайте атрибуты этих тел для получения полного представления тела. Тела - это вещи, которые вы моделируете, и инерция - это только один из их атрибутов.
Тело (1) и плоская инерция (2)

Инерция модели добавляется с помощью блоков из библиотеки «Элементы тела». К соответствующим блокам относятся твердотельные блоки, блоки инерции и блоки в поддиапазоне «Переменная масса». Можно моделировать полное твердое тело или обычную инерцию. Могут иметь фиксированные или переменные параметры инерции, хотя точная параметризация и, следовательно, тип твердого тела или инерции зависят от блока. Термин «твердое тело» используется здесь для обозначения элемента, атрибуты которого выходят за рамки просто инерции, и термина «инерция», когда используется для обозначения элемента, атрибуты которого охватывают только инерцию.
Фиксированные твердые тела. Используйте твердотельные блоки при моделировании твердых тел и тел, из которых они состоят. Эти блоки позволяют задать геометрию и цвет, ключевые атрибуты, если визуализация твердого тела важна для пользователя. Они также позволяют автоматически вычислять менее доступные параметры инерции вращения из твердотельной геометрии и массы или плотности массы. Даже в тех случаях, когда геометрия и цвет являются излишними деталями, твердотельные блоки часто являются наиболее удобным средством задания инерции. Обратите внимание, что параметры геометрии и инерции твердотельных блоков строго постоянны. Чтобы моделировать твердые тела с атрибутом переменной, необходимо использовать блоки из вспомогательной библиотеки переменных масс.
Переменные твердые тела. Используйте твердотельные блоки в библиотеке «Элементы тела» > «Переменные массы» для моделирования полных тел с переменными параметрами инерции, такими как масса, и зависимыми от инерции размерами, такими как длина и радиус, которые могут динамически изменяться в зависимости от входных значений инерции. Блоки, представляющие твердые тела, идентифицируются как таковые с помощью слова Solid в названиях - например, Variable Cylindrical Solid и Variable Brick Solid. Эти блоки отличаются от твердотельных блоков в родительской библиотеке тем, что один или несколько параметров инерции могут изменяться, а от блока «Общая переменная масса» - тем, что они обладают геометрией и цветом.
Фиксированные инерции. Используйте блок Инерция (Inertia) как средство регулировки инерции тела или тела. Геометрия и цвет считаются неприменимыми для целей моделирования. Можно вычесть массу, чтобы учесть существование полой области, такой как пустой отсек в сосуде, первоначально смоделированном без него. Можно также добавить массу, чтобы учесть наличие небольших возмущений, таких как скопления грязи, которые иногда задерживаются на автомобильном колесе. Обратите внимание, что те же настройки, иногда более интуитивно, можно выполнить с помощью более сложных твердотельных блоков.
Переменные инерции. Зарезервируйте блок Общая переменная масса (General Variable Mass) для особых случаев, в которых масса, центр массы или тензор инерции должны изменяться в ответ на некоторые входные данные - часто только само время - не делая предположений о твердотельной геометрии. Можно моделировать такие события, как определение нагрузки задним фоном (пример переменной массы), перемещение пассажира на подъемнике (пример переменного центра массы) и раскачивание текучей нагрузки, содержащейся в автоцистерне (пример тензора переменной инерции).
Твердотельные блоки имеют доступ к данным геометрии и, следовательно, могут рассчитывать параметры инерции, задаваемые формой и массой. Этот элемент значительно сокращает количество параметров, которые необходимо указать в модели. Автоматический расчет инерции всегда включен в переменных твердотельных блоках, таких как «Переменное цилиндрическое тело» и «Переменный цилиндрический кирпич». Он включен по умолчанию в твердотельных блоках, что означает возможность изменения этого параметра.
Можно также явно указать параметры инерции, например, чтобы точно зафиксировать инерцию тела, для которого имеется только грубая геометрия. Примером является звено нечетной формы, например, типичное для экскаватора заднего хода, которое было аппроксимировано с использованием простой формы блока Brick Solid. Твердотельная геометрия в этом случае не очень точна, и можно задать параметры инерции с помощью данных САПР (или других данных).
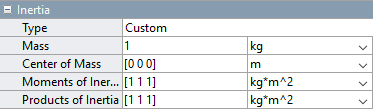
При явном указании инерции можно использовать две параметризации. Можно рассматривать твердое тело или инерцию как точечную массу: Point Mass параметризация. Другой позволяет рассматривать твердое тело или инерцию как распределенную массу: Custom параметризация. С помощью раскрывающегося списка Инерция (Inertia) > Тип (Type) можно выбрать вариант, наиболее подходящий для приложения.

Обратите внимание, что Point Mass и Custom параметризации доступны только в тех блоках, которые поддерживают явную спецификацию инерции. Переменные твердотельные блоки в библиотеке «Body Elements > Variable Mass» также не предоставляются. В этих блоках центр масс и тензор инерции строго зависят от геометрии и плотности тела и по этой причине всегда автоматически вычисляются во время моделирования.
Point Mass Приближение. Точечная масса - аппроксимация, имеющая в качестве своих единственных инерционных параметров центр масс и общую массу - меру поступательной инерции и, следовательно, сопротивления внезапному изменению поступательной скорости. Инерция вращения принимается ничтожной и игнорируется. Расположение центра масс может изменяться в зависимости от начала локальной опорной рамки.

Custom Массовые распределения. Распределенная масса является более общим представлением инерции. Он имеет среди своих инерционных параметров не только общую массу и центр масс, но и моменты инерции, и продукты инерции. Моменты и произведения инерции включают то, что известно как тензор инерции или матрица. В совокупности этих параметров достаточно для полного описания, с точки зрения моделирования множества тел, распределения массы в пространстве.
Примечание о совместных соединениях. Будьте осторожны при соединении инерций с нулевыми моментами инерции, такими как точечные массы, с соединениями со степенями свободы вращения - составными, по крайней мере, частью примитивов вращающихся или сферических соединений. Суммарный момент инерции вокруг осей вращения соединения должен быть ненулевым с каждой стороны. Причина этого проста: угловое ускорение вокруг оси становится бесконечным независимо от приложенного крутящего момента, если момент инерции вокруг этой оси равен нулю. Это поведение не является физическим и запрещено в модели.
Блоки в библиотеке Body Elements имеют порты опорной рамы, которые соединяются для разрешения размещения соответствующих элементов - тел, инерций - в контексте модели. Опорные рамки являются жесткой частью этих элементов и естественным образом перемещаются вместе с ними как с единицей измерения. Они используются, прямо или косвенно, для определения инерций и, в твердых телах, геометрии элементов.
Если концепция кадра является чужой, см. раздел Работа с кадрами. Лаконично, кадр - это триада осей, во многом похожая на декартову систему координат. Она имеет положение и ориентацию, которые можно определить с помощью интерфейса создания рамы блока «Твердое тело» или параметров блока «Жесткое преобразование». Все положения и ориентации в модели - твердые тела, инерции, соединения и зависимости, силы и моменты, датчики - определяются через рамки.
Опорная рамка твердого тела
В модели можно визуализировать тела и инерции. Тип визуализации зависит от используемого блока. Твердотельные блоки, в том числе из библиотеки «Элементы тела» > «Переменные массы», позволяют визуализировать соответствующие элементы с помощью заданной геометрии. Можно также визуализировать твердое тело с помощью простого графического маркера, такого как сфера, например, чтобы выделить его положение в случаях, когда геометрия известна как неточная.
Инерции не имеют геометрии и цвета и, естественно, не поддерживают визуализацию на основе геометрии. Необходимо визуализировать такие элементы с помощью альтернативных средств. Если элемент связан с блоком «Общая переменная масса», можно использовать те же графические маркеры, что и в твердотельных блоках, или эквивалентный эллипсоид инерции - форму, размеры которой напрямую зависят от заданных параметров инерции. Если элемент связан с блоком инерции, можно использовать маркеры твердотельных блоков или значок инерции.
Дополнительные сведения о визуализации см. в разделе Визуализация модели и ее компонентов.
Добавьте фиксированную инерцию в модели с двойным маятником, расположите ее на свободном конце внешнего звена и установите ее массу равной 25 g с помощью Point Mass параметризация:
В командной строке MATLAB введите smdoc_double_pendulum. Открывается модель двойного маятника. В нем находятся три блока Simulink Subsystem, каждый из которых представляет тело. Сохраните модель под другим именем в удобной папке.
Из библиотеки Body Elements добавьте блок инерции и подключите его порт опорной рамы (с меткой R) к самому правому порту рамы Binary Link A1 блок. Рама, связанная с этим портом, расположена на свободном конце двойного маятника.
В диалоговом окне «Блок инерции» задайте для параметра «Масса» значение 25 g- значение, приблизительно эквивалентное четверти массы двоичной связи (130 g). Point Mass параметризация в этом блоке позволяет игнорировать параметры инерции вращения.
Моделирование модели. Mechanics Explorer открывается с динамической визуализацией обновленного двойного маятника. Обратите внимание на значок инерции, используемый для обозначения расположения элемента инерции.

Пример указания параметров пользовательской инерции см. в разделе «Try It: Specify a Custom Inertia».
По мере того, как твердые формы растут в сложности, параметры инерции становятся все более громоздкими для определения, и другой подход может подойти вам лучше: объединение. Сложное твердое тело или инерцию можно представить в виде набора более простых элементов и явно указать их параметры инерции, используя блок инерции или блок общей переменной массы, или настроить их для автоматического расчета, если используется твердотельный блок.
При жестком соединении более простых элементов с помощью линий соединения рамок и, при необходимости, блоков жесткого преобразования получается агрегат, свойства инерции которого отражают свойства сложного твердого тела или инерции, которые требуется представить. Примером может служить двоичная ссылка, показанная на рисунке. Связь можно разделить на три секции, представить каждую секцию с помощью отдельного блока и соединить соответствующие опорные рамки с помощью соответствующих жестких преобразований.
![]()
Пример задания геометрии двоичной связи путем объединения см. в разделе «Попробуйте создать составную геометрию».
В среде Simscape Multibody не требуется, чтобы параметры инерции были положительными. Сюда входят масса и моменты инерции, оба параметра, которые в физическом мире являются строго положительными. Отрицательные инерции позволяют моделировать составные инерции с полыми сечениями путем вычитания и поэтому полезны в некоторых моделях.
Двоичная ссылка снова служит примером. Можно представить звено как единое целое без отверстий с помощью одного блока и вычесть из его концов инерции отверстий с помощью дополнительных блоков. Как и ранее, необходимо использовать жесткие преобразования для правильного расположения опорных рамок инерции относительно друг друга.
![]()
Пример, показывающий, как задать инерцию путем объединения, см. в разделе Try It: Create a Compound Inertia.
