Simscape™ Multibody™ обеспечивает измерение силы и крутящего момента в соединительных блоках. Эту функцию измерения можно использовать для вычисления и вывода различных типов сил и моментов, действующих непосредственно на соединения. Типы силы и крутящего момента, которые можно определить, включают следующие:
Вводы включения соединения
Зависимости соединения
Объединенные вводы, ограничения и внутренняя механика
В этом учебном пособии рассматриваются различные типы измерения силы и крутящего момента, обеспечиваемые блоками соединения Simscape Multibody.
В командной строке MATLAB ® введитеsmdoc_rack_pinion_c. Simscape Multibody открывает модель рейки и шестерни, которую можно использовать для изучения возможности измерения силы и крутящего момента соединительных блоков.
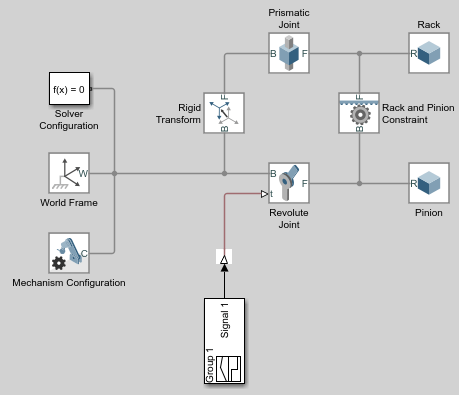
Модель зубчатой рейки и шестерни содержит вход исполнительного момента, который приводит в действие шарнир вращения шестерни. Блок преобразователя Simulink-PS обрабатывает входной сигнал с использованием фильтра второго порядка, сглаживая любые резкие изменения или разрывы, которые может иметь сигнал. Для определения момента срабатывания, наблюдаемого в блоке поворотного соединения:
В диалоговом окне «Поворотное соединение» выберите «Z Rolute Primitive (Rz) > Датчик > Крутящий момент привода». Блок открывает физический сигнальный порт с меткой T. Этот порт выводит 3-D векторные компоненты крутящего момента исполнительного механизма соединения в физическом сигнале Simscape.
Перетащите в модель следующие блоки:
PS-Simulink Converter из библиотеки Simscape > Утилиты
В рабочую область из библиотеки Simulink > Раковины
Подключите блоки, как показано на рисунке.
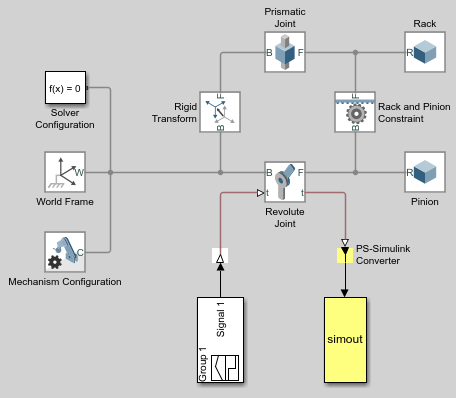
Моделирование модели. Блок To Workspace выводит сигнал крутящего момента исполнительного механизма в переменную временного ряда simout, доступную в базовом рабочем пространстве MATLAB.
В командной строке MATLAB введите:
figure; plot(simout);
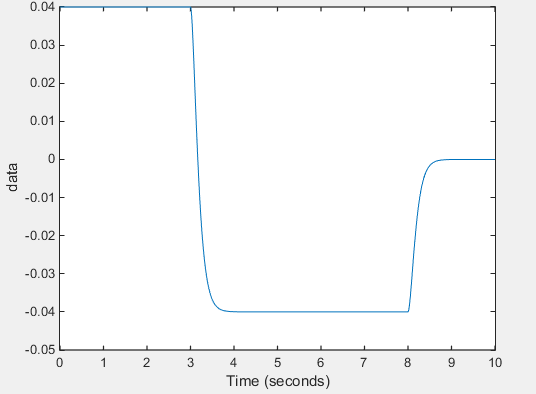
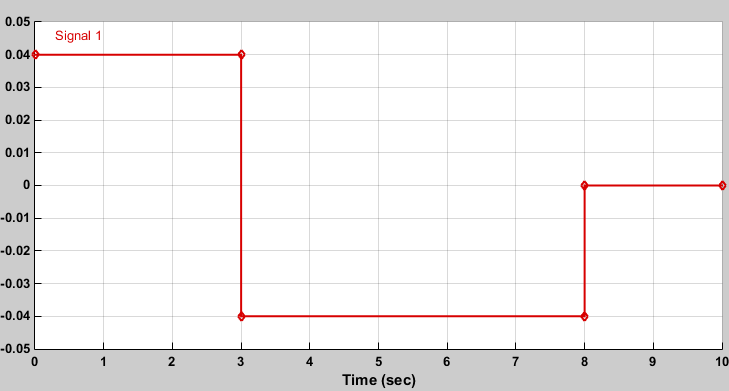
Сравните график крутящего момента привода с исходным входным сигналом в блоке Signal Builder. Игнорируя любое сглаживание сигнала из-за фильтрации второго порядка, эти два сигнала идентичны. На следующем рисунке показан исходный входной сигнал.
Измерение силы и крутящего момента исполнительного механизма позволяет анализировать требуемые силы и моменты, чтобы получить заданную траекторию соединения. Эта функция используется в модели для выполнения обратного динамического и других типов анализа.
Силы зависимости соединения, которые действуют по нормали к примитивным осям соединения, ограничивают движение назначенными степенями свободы соединения. В блоке «Поворотное соединение» силы ограничения сопротивляются тяге силы тяжести, удерживая шестерню неподвижной относительно мировой рамы. Чтобы определить силы зависимости, выполните следующие действия.
В блоке «Конфигурация механизма» задайте для параметра «Равномерная сила тяжести» значение Constant. Эта настройка обеспечивает воздействие силы тяжести на систему реек и шестерен. Проверьте, что вектор гравитации [0 0 -9.80665].
В диалоговом окне «Вращательное соединение» выберите «Композитная сила/датчик крутящего момента» > «Сила зависимости». Блок открывает физический сигнальный порт fc. Этот порт предоставляет векторные компоненты силы ограничения для всего соединения в физическом сигнале Simscape. По умолчанию это сила ограничения, которую кадр порта толкателя оказывает на кадр порта базы, разрешенная в кадре порта базы.
Отмените выбор примитива вращения Z (Rz) > Датчик > Крутящий момент привода.
Убедитесь, что блок PS-Simulink Converter теперь подключен к порту физического сигнала fc.
Моделирование модели. В командной строке MATLAB введите:
figure; plot(simout);
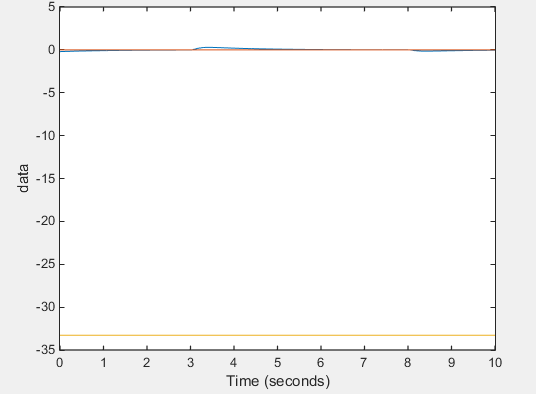
Силы зависимости гарантируют, что рамки сварных соединений остаются фиксированными относительно друг друга. Блок сварного соединения можно поместить в подсистему тела для определения внутренних сил и моментов, действующих внутри тела во время моделирования. Пример того, как это можно сделать в модели двойного маятника, см. в разделе Восприятие сил зависимости.
Помимо сил и моментов приведения в действие и ограничения, соединительные рамы могут также взаимодействовать посредством обмена внутренними силами и моментами. Эти силы и крутящие моменты, которые обусловлены пружинными и демпферными элементами, внутренними по отношению к самому соединению, позволяют учитывать рассеивание и накопление механической энергии между рамами соединения. Можно определить общую композитную силу и крутящий момент, действующие в соединении, которое включает в себя вклад от приведения в действие, ограничения и внутренних сил и моментов. Для определения полного крутящего момента, действующего между рамами порта блока поворотного соединения:
В диалоговом окне «Поворотное соединение» выберите «Композитное измерение силы/крутящего момента» > «Суммарный крутящий момент». Блок открывает физический сигнальный порт tt. Этот порт выводит суммарный крутящий момент, действующий между соединительными кадрами в качестве физического сигнала Simscape.
Снимите флажок «Композитная сила/датчик крутящего момента» > «Сила зависимости».
Моделирование модели.
В командной строке MATLAB введите:
figure; plot(simout);
MATLAB строит векторные компоненты вектора общего крутящего момента как функцию времени. Все компоненты, кроме одного, равны нулю во время моделирования. Ненулевая составляющая, крутящий момент, направленный вокруг оси Z, содержит вклад крутящего момента от приведения в действие и внутренние моменты, но не от моментов ограничения.
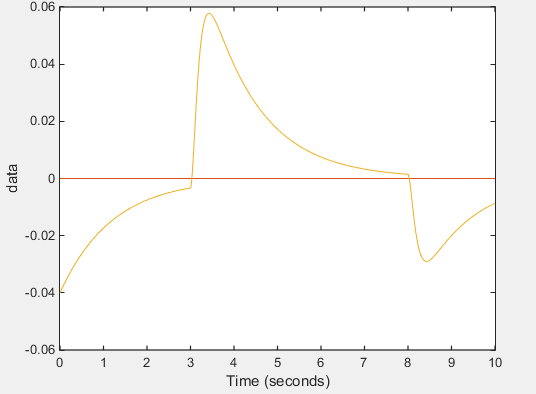
Пики крутящего момента соответствуют значениям крутящего момента срабатывания, указанным во входном сигнале. Эти пики со временем затухают из-за внутренних моментов демпфирования, указанных в диалоговом окне Блок вращения соединения (Revolute Joint). Демпфирующие моменты вызывают рассеяние энергии, очевидное в переходных участках графика общего крутящего момента.
Чтобы убедиться, что общий крутящий момент исключает какой-либо вклад из крутящих моментов ограничения, попробуйте определить крутящие моменты ограничения напрямую. График моментов зависимости покажет, что они на самом деле ничтожны.
